여기서 cargo, rustc, rustdoc 은 각각 다음과 같은 역할 이다. 보통 cargo 를 가장 많이 쓰기때문에 rustc 와 rustdoc 은 직접 사용할 일이 많지 않을 거라고 내가 본 책이선 말했다. (괄호의 비유는 내 생각일 뿐 틀렸다면 지적 해주면 좋겠다.)
cargo: 컴파일 및 패키지 관리자( make 와 유사한 역할을 하는 것으로 보인다.)
rustc: 컴파일러
rustdoc: 러스트 문서화 도구, 소스 코드에 특정 형식으로 주석을 달면 html 문서를 만들어 준다.(doxygen 의 역할을 해주는 것 같다.)
이 논문은 새로운 방식의 bbox regression 방식인 DFL(distribution focal loss) 와 localization quality와 classification score 동시에 표현해 최적화 하는 quality focal loss를 제안하고 이 둘을 합쳐 Generalized Focal loss라고 명명한다.
localization quality란 FCOS 관점에서 보면 object의 centerness score에 해당한다.
문제 1. 학습/추론 시 localization quality estimation 과 classification score 의 사용 방식이 불일치
사유 1. FCOS 같은 one stage detector들은 학습시 classification score 와 centerness(또는 iou)score 가 별개로 학습되지만 inference 시에는 nms전에 두 score를 join해서 사용(element wise multiplication)한다. 위 Figure 1의 (a)의 train와 test이 이를 잘 보여준다. 사유 2. positive sample 위치에만 localization quality estimation에 대한 label이 주어진다. 학습과 추론 단계에서의 두 score의 학습/사용 방식이 상이한 점이 성능 저하로 이어 질 수 있음
문제 2. 박스 표현의 경직성(Inflexible representation of bouding boxes) 기존 방식들은 positive sample 위치에만 box gt를 할당해 regression 하는 방식을 취하는데 이는 dirac delta distribution으로 볼 수 있다. 이유는 이런 단순 한 box gt 할당은 database에 존재 할 수 있는 다양한 애매하고 불명확한 상황을 고려하지 못하기 때문이다. 예를 들어 물체의 occlusion, shadow, blur등으로 인해 물체의 경계가 불분명 해 질 수 있고 이 경우 Dirac delta distribution은 이런 경우를 커버하기엔 제한 적이다.
위 Figure 3에서 보면 이 논문에서 제안하는 방식으로 bbox 표현을 학습 하면 가림, 그림자, 흐림 등의 경우에도 target 물체의 모양을 고려해 더 fit한 bbox를 추측 할 수 있다는 것을 나타낸다. 왼쪽 그림의 경우 서핑 보드가 파도에 의해 가림이 생겼는데 이 논문에서 제안한 방식으로 학습한 경우 녹색과 같이 박스가 추측 된다. 이미지 오른 쪽의 그래프는 아직 이해 하지 못해도 된다. 이것 distribution focal loss파트를 읽어 보면 이해 되는 그래프이다.
몇몇 논문에서 bbox를 gaussian distribution으로 표현해 학습 하는 방법을 제안했지만 이는 단순 한형태여서 다양한 상황을 커버하지 못한다(고 주장한다)
Method
Quality Focal Loss(QFL)
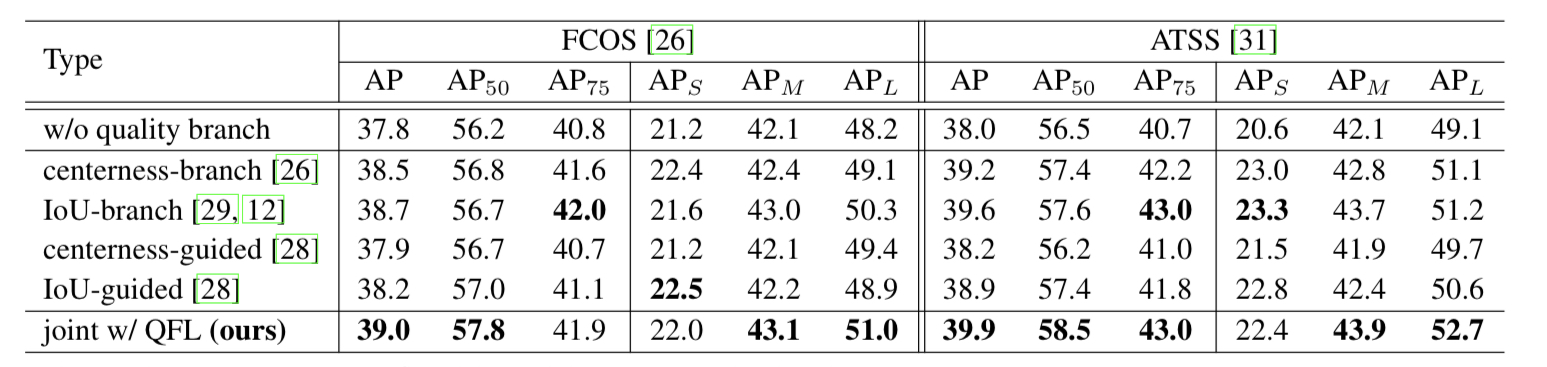
quality focal loss는 localization quality estimation과 classification score를 혼합한 classification-iou score를 최적화 하기 위한 loss function으로 위 “기존 방식의 문제점” 섹션에서 언급한 문제 1의 train-test inconsistency를 해결한다.
localization quality estimation과 classification score를 혼합했기 때문에 one-hot category label이 아닌 soften된 label $y \in [0,1]$ 이 사용된다. $y=0$은 negative sample로 0 quality score(IoU score) 를 나타내고, $ 0 < y \leq 1 $ 은 positive sample로 quality score y가 loss의 target y로 사용된다.
여기서 localization quality estimation과 classification score를 혼합하면 왜 one-hot category label 이 아니라 soften된 label 이 target이 되는지 의문이 들 수 있다. 나도 처음엔 이게 의문이었다. 이유는 classification score(one-hot)에 각 positive sample의 위치 anchor(또는 center position)에 해당하는 pixel에서 추론된 predicted bbox와 target bbox의 IoU score를 곱해서 target으로 사용 하기 때문이다. (one-hot label에서 positive sample의 label은 1이니까 IoU score곱한다는 의미는 IoUscore를 target label로 사용하겠다는 것과 같다). 이게 위 Figure 4의 existing work 과 GFL의 차이에서 label이 soften된다고 나타낸 이유이다.
QFL의 수식은 아래와 같다. $$QFL(\sigma) = -\left \vert y - \sigma \right \vert ^{\beta} ((1-y)\log{(1-\sigma)} + y\log{\sigma}$$
focal loss에서 달라진 부분은 두 부분이다. 1. cross entropy part인 $-\log{(p_t)}$ 가 binary classification의 complete form인 $1((1-y)\log{(1-\sigma)}+y\log{\sigma}$ 로 바뀌었다. 2. scaling factor $(1-p_t)^gamma$ 가 추정치 $\sigma$와 label $y$의 L1 distance $\left \vert y - \sigma \right \vert ^ \beta$ 로 바뀌었다.
위 형태에서 $y=\sigma$일 때 global minimum을 갖는다.
multi-class classification의 경우 sigmoid를 이용해 multiple binary classification으로 문제를 정의 한다. multiple binary classification에서 각각의 binary classification을 위와 같은 방식으로 풀면되므로 어려울 건 없다.
코드는 아래와 같고 mmdetection 에서 가져왔다. 필요 한 부분에 주석을 달아 두었으니 위 내용과 비교하며 보자.
def quality_focal_loss(
pred, # (n, 80)
label, # (n) 0, 1-80: 0 is neg, 1-80 is positive
score, # (n) reg target 0-1, only positive is good
weight=None,
beta=2.0,
reduction='mean',
avg_factor=None):
# all goes to 0
pred_sigmoid = pred.sigmoid()
pt = pred_sigmoid
zerolabel = pt.new_zeros(pred.shape)
# 아래는 negative sample 에 대한 loss
loss = F.binary_cross_entropy_with_logits(
pred, zerolabel, reduction='none') * pt.pow(beta)
label = label - 1
pos = (label >= 0).nonzero().squeeze(1)
a = pos
b = label[pos].long()
# positive goes to bbox quality
pt = score[a] - pred_sigmoid[a, b]
# positive sample 에 대한 loss 이고 target 으로 사용 되는 score 는 이 논문에서 제안한
# iou 와 classification score 를 결합하여 soften 한 label 이다.
loss[a,b] = F.binary_cross_entropy_with_logits(
pred[a,b], score[a], reduction='none') * pt.pow(beta)
loss = weight_reduce_loss(loss, weight, reduction, avg_factor)
return loss
Distribution Focal Loss
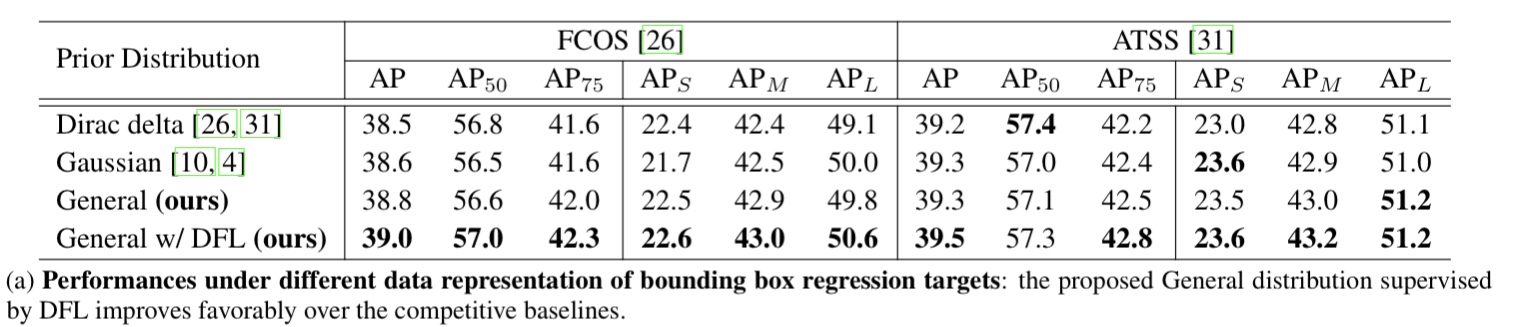
DFL은 참신 하면서도 이해가기 매우 쉽다. DFL에 대하 설명 하기 전에 이 논문에서 bbox regression문제를 어떻게 정의 했는지 먼저 살펴보자. 이 부분이 꽤 참신하며 yolo등에서 bbox regression에 이 방식을 채용했다.
이 논문은 anchor 또는 center point위치 로 부터 bbox의 각 변까지의 거리를 regression으로 직접 추론 하는 방식 대신 기대값을 구하기 위한 distribution을 추론 하는 방식으로 문제를 변경했다. 기존 bbox 추론 네트워크 들은 대부분 object 중심에 해당하는 anchor 에서 bbox의 각 변까지의 거리 (l,t,r,b)(아래 그림 참조) 에 해당 하는 4가지 값 scalar를 직접 추론 하는 방식을 채택했다. 이 방식을 굳이 수식으로 나타내면 특정 값에서만 확률 이 1인 Dirac delta function으로 나타낼 수 있기 때문에 이 논문에서는 기존 방식들은 distribution을 dirac delta로 가정 하고 문제를 풀었다고 말한다.
object 중심으로 부터 각 변까지의 거리 l,t,r,b
이 논문은 l,t,r,b를 직접적으로 추존 하는 대신 l,t,r,b의 확률 분포를 추론하고 이를 이용해 기대값을 계산함으로써 최종 l,t,r,b를 계산 한다. 수식으로 보면 아래와 같다. $$\hat{y} = \sigma_{i=0}^{n}P(y_{i})y_{i} $$ 위 식에서 $y_{i}$는 각변 까지의 거리 l,t,r,b의 discrete 한 값이고 $P(y_{i})$는 네트워크가 추론한 현 anchor에서 object boundary 까지의 거리 l,t,r,b가 $y_{i}$일 확률 값이다.
좀더 구체 적으로 예를 들자면 DFL은 object boundary 까지의 거리를 직접적으로 추론하는 것이 아니라 anchor 로 부터 object의 왼쪽 경계 까지 거리 $l$이 1일 확률 0.01, 2일 확률 0.05, 3일 확률 0.06, … 8일 확률 0.5, 9일 확률 0.2, … 16일 확률 0.01 이니까 $l$의 기대값은 XX이다! 라고 추론하고 이 기대값이 최종 추론 값이다.
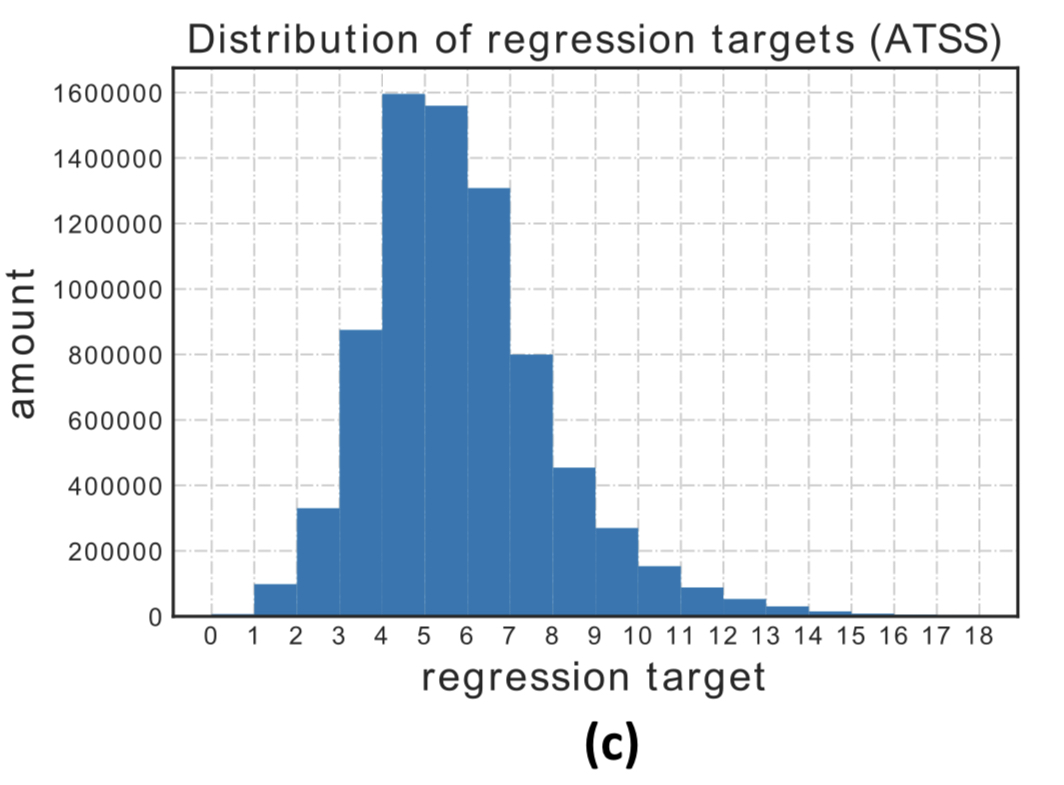
여기서 당연한 의문이 생길 수 있는데 “확률 분포는 그렇다 치고 $P(y)$ 를 구해서 기대값은 구하려면 $y$를 당연히 알아야 하는데 이건 어떻게 구했나?” 가 그 의문이다. 논문의 저자들은 coco trainval135k 데이터 셋에서 bbox regression target $l,t,r,b$의 histogram을 구했다. 그 결과가 아래 histogram 이다. 이를 보면 x축인 regression target이 약 1~16까지 분포해 있는 것을 알 수 있다. 이 정보에 기반해 $ y \in [0,1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16]$ 으로 미리 정해 놓고 각 $y_{i}$가 현 anchor에 대응 하는 각 변까지의 거리일 확률 분포 $P(y_{i})$를 추론 하도록 했다.
이러한 확률 분포 $P(y)$를 fitting 하기 위해 이 논문은 DFL(distribution focal loss)를 제안 하는데 아주 간단하고 명확해 보인다. 식은 아래와 같다. $$DFL(S_{i}, S_{i+1}) = -((y_{i+1}-y)\log(S_{i}) + (y-y_{i})\log(S_{i+1}))$$ target 을 y라 할때 y와 가장 가까운 값 $y_{i} \leq y \ge y_{i+1}$ 인 $y_{i}, y_{i+1}$에서 $P(y)$가 peak 값을 가지도록 위와 같은 complete form의 cross entropy 를 이용해 학습 한다. $S_{i}=\frac{y_{i+1}-y}{y_{i+1}-y_{i}}, S_{i+1} = \frac{y-y_{i}}{y_{i+1}-y_{i}} $ 이다. ($S_{i},S_{i+1}$ 이 왜 저렇게 되는지 궁금하면 linear interpolation을 생각해 보자)
예를 들어 실례를 들어 보자면 unnormalized logits $ y_{i}=[9.38, 9.29, 4.48, 2.55, 1.30, 0.42, 0.03, -0.28, -0.51, 0.83, -1.27, -1.56, -1.78, -1.94, -.193, -1.38]$ 이라고 할때 target $y=0$ 이면 cross entropy 에 의해 $p(y_{0}), p(y_{1})$이 근처에서 peak 값을 갖도록 학습이 되는 방식이다.
코드로는 아래와 같다. 코드는 공식 mmdetection 에 삽입된 코드를 가져왔다.
def distribution_focal_loss(
pred, #normalized 되지 않은 y prediction 값이다. 즉 softmax 씌우기 전의 값
label, # target label 이다.
weight=None,
reduction='mean',
avg_factor=None):
disl = label.long()
disr = disl + 1
wl = disr.float() - label # y_{i} 에 대한 weight 계산
wr = label - disl.float() # y_{i+1} 에 대한 weight 계산
loss = F.cross_entropy(pred, disl, reduction='none') * wl \
+ F.cross_entropy(pred, disr, reduction='none') * wr
loss = weight_reduce_loss(loss, weight, reduction, avg_factor)
return loss
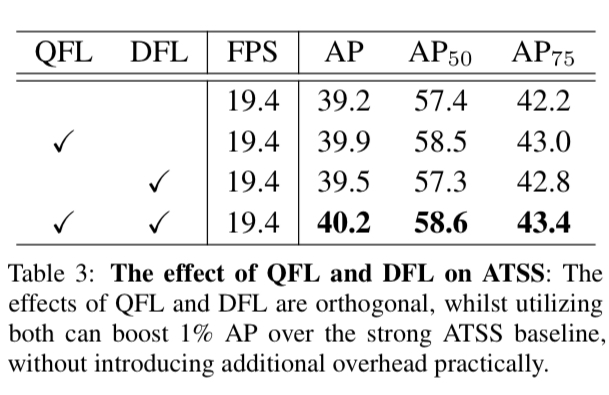
결과
이 논문에서 제안한 QFL, DFL의 효과에 대한 결과 이다. DFL보다는 QFL이 더 직접적으로 AP 향상에 영향을 미치는 것 처럼 보인다. QFL 만 적용 했을때가 DFL만 적용 했을때 보다 AP 컷다. 둘 모두 사용 하면 둘중 하나만 썻을 때 보다 AP 것을 알 수 있다.
기존 제안된 방식은 unlabeled data를 모델의 consistency만을 강화하는 방식으로 사용해 왔고 이는 unlabeled data로 부터 얻을 수 있는 많은 양의 prior knowledge 를 활용하지 못하는 방식이다.
1. 학습시 labeled data와 unlabeled data 를 분리해서 따로 사용하고 unlabeled data 는 다양한 manual perturbation 을 이용해 consistency 학습에만 사용 -> 이런 방식으로는 unlabeled data 가 가지는 정보를 모두 활용 하지 못하고 이는 모델이 sub optimal(local minima)에 도달하는 결과를 초래할 수 있다. 2. CCT와 같은 방식은 다양한 perturbation을 생성해 consistency를 학습하는 방식이기 때문에 학습 시간이 오래걸릴 수 있음
아래 Figure 1. (c)를 보면 CCT 로 생성한 pseudo mask 는 부정확 한데 본 논문의 저자들은 이것을 자신들의 주장을 뒷바침 하는 근거로 제시한다.
Proposed method
GuidedMix-Net에서는 labeled data 의 정보를 unlabeled data 에 전달해 학습을 guide 하는 방법을 제안하고 이를 mutual information transfer 라 하고 전체 아키텍쳐는 아래 그림과 같다. (우선 이 그림엔 틀린 부분이 있는것으로 보이는데 official code 를 보면 parameter sharing 이 되는 부분은 Figure 2 의 붉은 색으로 표시된 encoder 부분만 이다. decoder 는 labeled data만 이용해 학습 하는 decoder 와 mix input을 이용해 학습하는 decoder가 서로 다르다.)
labeled data의 정보를 이용해 unlabeled data을 이용한 학습을 guide 하기 위해 이논문에서는 3step process 를 제안한다.
1. labeled-unlabeled pair interpolation
2. Mutual information transfer
3. pseudo mask generation
Labeled-unlabeled pair interpolation
이 단계는 labeled image ($x^{i}_{l}$) 와 unlabeled image($x^{j}_{u}$)을 혼합하해 Figure 2 의 아래쪽 입력에 해당하는 혼합이미지 $x^{j}_{mix}$를 생성하는 단계이다.
Function 1.
혼합 이미지를 생성하는 방법은 위와 같다. labeled image ($x^{i}_{l}$) 와 unlabeled image($x^{j}_{u}$)를 $\lambda$ 비율로 더하는 과정이 전부이다. $\lambda \in (0,1)$ 로 $Beta(\alpha, \alpha), \alpha=1$ 로 부터 생성하고 $\lambda=min(\lambda, 1-\lambda)$ 와 같이 설정한다.
이때 랜덤으로 labeled-unlabeled image pair를 선택하는 것보다 유사 이미지를 선택하는 것이 더 효과적이라고 하는데 그 이유는 동일/유사한 object 를 포함한 두 이미지가 섞여야 labeled image 로 부터의 정보가 unlabeled image 로 전파 더 잘 전파 될 수 있기 때문이다. 유사 이미지를 선택하는 방법은 mini batch 내에서 encoder의 output 으로부터 계산한 euclidean distance 가 가장 작은 labeled-unlabaled image 쌍을 선택하는 것이다. 아래 식에서 $\Gamma$ 는 model의 encoder 를 의미한다.
한가지 트릭으로 이 방식으로 유사한 이미지 쌍을 선택하기 위해 encoder에 fullly connected layer 를 추가해 classification network을 만들고 labeled image만을 이용해 네트워크를 미리 트래이닝 시켜 비슷 한 이미지들이 feature space에서 유사한 위치에 있도록 한다.
이를 코드로 나타내면 아래와 같다. Official repo에서 발췌한 건데 mini batch 내에서 유사한 이미지를 선택하는 부분은 빠져 있고 mini batch random image pair를 만드는 방식이다. 또한 가지 Figure 2에서와 다른 부분은 $x_{mix}$를 생성할 때 사용 되는 것은 실제 입력 이미지가 아니라 encoder의 output 에 해당한 feature map 이라는 것이다.
단순히 labeled-unlabeled image 를 interpolation 하는 것 만으로는 labeled image의 신뢰할 수 있는 정보(labeled 이 있기때문에 이렇게 표현한 것 같다)가 unlabeled image로 흐르는 것이 제한 적이기 때문에 이를 보완 할 방법으로 non-local block을 제안한다.
왜 단순 pairing 만으로 신뢰할 수 잇는 정보의 전파가 안되는 것일까? 이건 convolution filter의 특징때문으로 볼 수 있다. convolution filter 는 지역성을 가진다. 따라서 pairing된 이미지에서 같은 class에 속한 object 가 서로 유사한 위치에 있을 때(short-range)는 convolution만으로도 labeled image의 정보가 unlabeled image 로 흐를 수 있지만 mixed 된 이미지에서 정보를 전달할 object들이 서로 원거리에 있다면(long-range) 단순 convolution연산 만으로는 이 논문에서 원하는 효과가 제한적이다.
그래서 이 논문에서는 non-local block을 사용 했다. Figure 3 의 블러도만 봐도 단적으로 안수 있듯이 self-attention과 같은 역할을 하는 non-local block을 이용해 long-range 정보를 전달하겠다는 전략이다. (self-attention 은 임의의 두 포인트의 interaction을 계산하기 때문에 long range dependency를 직접적으로 계산할 수 있다.)
논문에서는 이 모듈을 MITrans 라 명명 하는데 Mutual Information Transfer 이라는 의미이다.
왜 이 블럭이 labeled image 의 정보를 이용해 unlabled-image의 학습을 가이드 할 수 있다고 주장하는 것인지 의문이 들수 있는데 간단히 생각해 보자. labeled image를 이용해 supervised learning 을 진행 하므로 labeled image 가 encoder 를 거쳐 생성 되는 feature map에 있는 정보는 꽤나 신뢰 할 만 한 각 class 에 속하는 pixel들의 정보라 할 수 있다. 이 feature 과의 convolution 연산 이나 self-attention 연산을 거쳤을 때 그 response 가 크면 smoothness assumption 에 의해 유사한 feature 라고 볼 있다. 작으면 유사하지 않은 feature 라고 볼 수 있다. unlabeled image 로 부터 추출한 feature 가 labeled image로 부터 추출한 feature를 통해 correction 되는 효과를 기대할 수 있다는 것이다. 이 때문에 mutual information transfer라고 이 개념을 설명 한다.
한가지 정말 맘에 드는 것은 MITrans block은 모델을 학습 할때만 사용 된다. 단순 inference time에는 이 블럭이 사용되지 않는다. 이게 왜 중요한 부분인지 edge device에서 서비스를 해본 사람은 이해 할 수 있을 것이다. (23년 기준..). Edge device의 경우 chip vender에 따라 self attention에 필요 한 연산을 지원하는 sdk를 아직 배포 하지 않는 곳도 있고 오래된 sdk version을 사용 하는 경우 self attention 을 inference time에 사용하는게 불가능 한 경우가 있기 때문이다.
중요한 블럭인것은 맞지만 Figure 3 만 봐도 의도를 직관적으로 파악 할 수 있으므로 수식을 생략한다.
pseudo mask generation
마지막으로 labeled-unlabeled image pair 를 이용해 생성한 $x_{mix}$ 를 MITrans 에 통과 시킨후 decoder 를 통해 생성한 segmentation mask 는 labeled image에 존재하는 object에 해당하는 부분이 존재한다.
이 부분은 unlabeled image의 pseudo gt 로 사용 하기에 필요 없을 뿐더러 해당 부분에 대한 정확한 정보는 labeled image 의 GT를 이용해 supervised learning process(Figure 1의 윗 부분)에서 학습 되므로 필요가 없다.
이러한 이유로 이 논문에서는 mixed image를 이용해 생성한 pseudo mask 에서 labeled image 에 해당 하는 부분와 unlabeled image 에 해당 하는 부분을 분리 하는 방법(decoupling method)을 생각해 냈다. 방법 자체는 아주 단순하고 직관적이다. mixed image를 네트워크에 통과시켜 얻은 prediciton 에서 labeled image를 네트워크에 통과시켜 얻은 prediction 을 빼는 것이다.
왜 이렇게 한 것일까? mixed image는 labeled/unlabeled image의 가중 합으로 생성된 것이므로 mixed image를 네트워크에 통과시켜 나온 prediction은 labeled image와 unlabeled image 를 네트워크에 각각 통과시켜 나온 prediction $M_{l}, M_{u}$ 을 더한 것과 유사할 것이라는 가정에서 시작 된다.
수식으로 표현 하자면 아래와 같다.
여기서 $\Gamma$는 segmentation network을 나타내고 $M_{l},M_{u}$는 각각 labeled image , unlabeled image의 prediction 에 대응 된다.
저자는 hard decoupling과 soft decoupling 두 가지를 테스트 해봤는데 soft-decoupling 이 결과는 더 좋았다.
hard decoupling
Hard decoupling 은 정말 mixed image와 labeled image의 prediction을 단순 뺄샘한다. 하지만 mixed image를 생성 할때
$x_{mix} = \lambda x_{l} + (1-\lambda)x_{u}$ 와 같이 두 이미지를 weighted sum 하기 때문에 이는 적절하지 않아 보인다.
Soft decoupling
soft decoupling은 입력인 mixed image를 생성할 때 사용했던 weight $\lambda$를 고려해 위와 같이 pseudo mask 를 생성한다. soft decoupling을 사용 할때 얻을 수 있는 장점은 같은 class에 속한 object 가 labeled, unlabeled image 의 동일 한 위치에 있을때 labeled image prediction 을 mixed image prediction 에서 빼도 unlabeled image object에 대한 추론 정보가 남아있다는 것이다.
위와 같이 생성된 psedu mask $M_{u-dec}$는 unlabeled image의 pseudo GT 로 활용하며 unlabeled image의 loss는 아래와 같이 mean squred error로 계산 된다.
$M_{u-dec}$ 는 soft-decoupling 또는 hard decoupling 을 통해 생성한 pseudo mask 이고 $M_{u}$ 는 unlabeled image의 prediction 결과 이다.
Loss
GuidedMix-Net 의 loss function 은 아래와 같다.
$L_{usup} 은 바로 이전에 unlabeled image의 loss 이고 $\omega$ 는 unsupervised loss weight 으로 하이퍼 파라미터이다.
$L_{sup}$는 labeled image의 superised loss 이다. 직관 적으로 알 수 있듯이 $L_{ce}$ 는 labeled image의 cross entropy이고 $L_{cla}$는 image level의 classification loss 이다. 이전 섹션인 proposed method의 similar image selection 을 위해 encoder에 fully connected layer 를 추가해 classification network 을 학습 시킨다고 했는데 이 부분에 해당하는 loss 이다.
$L_{dec}$ 에 대한 아래 부분은 설명이 틀릴 수 있음을 밝힌다. 코드 상에서 해당 하는 부분을 정확히 파악 할 수 없어 정확한 의미 파악이 힘들다. 틀린 부분은 지적바란다.
$L_{dec}는 labeled image의 consistency loss term 으로 볼 수 있다. labeled-unlabeled image pair 를 이용해 mixed image를 생성했던 것을 그대로 labeled-labeled image pair 에 적용해 mixed image 를 생성한다. (단 여기서 labeled image pair 에 속한 두 장의 이미지는 같은 이미지인것으로 보인다.)
$\hat{x_{l}}, x_{l}$가 모두 labeled image 일때 $x^{l}_{mix}= \lambda x_{l} + (1-\lambda)\hat{x_{l}}$과 같이 생성한다. 이를 network에 통과시켜 prediction $M_{mix}$를 얻는다. 그 후 labeled-unlabeled image pair의 prediction decoupling 방법을 여기에 적용한다. $M_{dec}=M_{mix} -M_{l}$ 여기서 M_{l}은 labeld image $x_{l}$의 prediction 이다.
이렇게 구한 $M_{dec}$ 를 이용해 아래와 같이 구한다.
Result
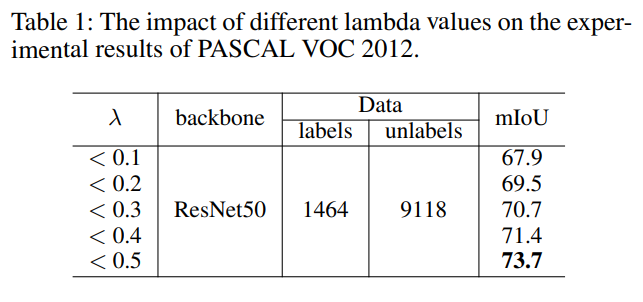
Table 1은 $\lambda$ 값의 변화가 성능에 미치는 영향을 보여준다. $\lambda$ 의 제한 범위에 따라 성능이 굉장히 상이 하니 참조 하자.
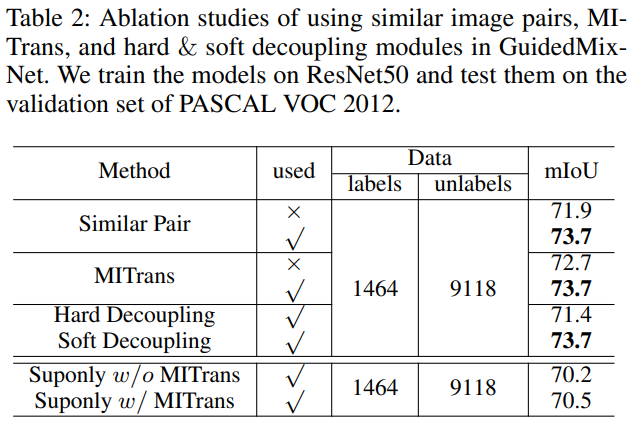
Table 2는 similar labeled-unlabeled image pair selection, MITrans(mutual information transfer) block, hard/soft decoupling 의 적용에 따른 결과를 보여 준다.
labeled-unlabeled image pair selection 의 경우 random selection 보다 eclidean distance 를 이용한 silimar image pair selection 을 할 경우 성능이 더 좋았다. MUTrans block 도 사용하는 경우 성능이 더 좋았다. Hard decoupling 보다는 soft decoupling 을 사용하는게 더 성능이 좋았다.
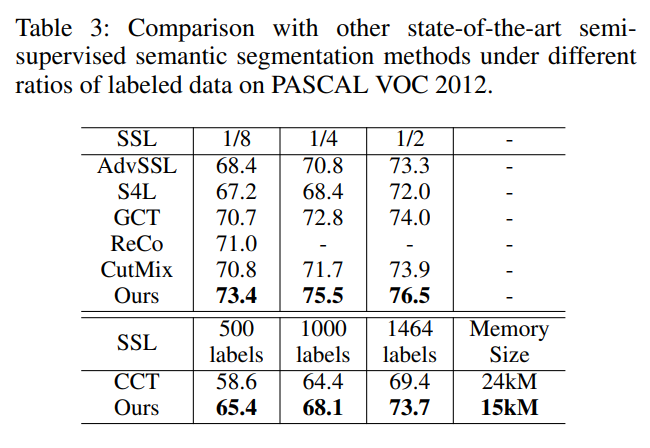
다음으로 다른 SOTA 들과의 비교이다. 다른 semi supervised learning 기반 방식들 보다도 동일한 비율의 labeled 데이터를 사용 했을 때 더 좋은 성능을 보였고 개인적으로 인상깊은 것은 이전에 읽은 논문인 CCT와의 비교 였다.
CCT대비 큰 성능 이득을 보여 주는게 인상적이었다. 내 데이터 셋에 적용해 비교해 봐야겠다.
semi supervised learning을 왜 사용하는가? semi-supervised learning의 주목적은 단순한 질문에서 시작된다.
"label이 존재하는 데이터만 사용하는 것과 비교했을때 unlabeled data points를 이용해 더 정확한 예측을 할수 있을까?"
이론적으로 답은 당연히 "yes"이다. 다만 여기엔 전제 조건이 있고 지금 부터 그 전제 조건들을 정리해보자.
수학적으로 위 문장을 표현해 보자면 unlabeled data로 부터 얻은 random variable x에 대한 지식 $p(x)$가 조건부 확률 $p(y|x)의 추정에 도움이 될때 semi-supervised learning은 효과가 있다. 이 전제가 깨지면 semi-supervised learning은 의미가 없다.
Semi-supervised smoothness assumption
if two points $x_{1}, x_{2}$ in a high-density region are close, then so should be the corresponding outputs $y_{1}, y_{2}$
말인 즉 "데이터 x_{1}, x_{2}가 데이터 공간상에서 가까운 거리에 있다면 그 대응 되는 출력(outputs이라고 되어 있는데 예측(=prediction) 값을 말한다)도 예측 공간상에서 가까운 거리에 위치 해야 한다"는 의미이다.
다른 말로 하면 비슷한 입력에 대해 비슷한 출력을 갖는다는 것이다. 즉, 데이터 공간에서 인접한 점들은 유사한 레이블을 갖는 경향이 있다는 것이다.
Smoothness assumption은 레이블이 없는 데이터를 활용하여 결정 경계(decision boundary)를 부드럽게 만드는 데 도움을 준다. 즉, 레이블이 있는 데이터에 대한 정보를 기반으로 레이블이 없는 데이터를 예측하는 과정에서, smoothness assumption에 따라 이웃하는 데이터의 레이블 정보를 활용하여 결정 경계를 조정하거나 보완하는 것이다
Cluster assumption
If points are in the same cluster, they are likely to be of the same class
데이터가 같은 클러스터에 속한다면 같은 클래스에 속할 것이다. 라는 뜻으로 매우 합리적으로 보인다. 이 가정이 어떻게 semi-supervised learning을 지지하는 가정일까? 입력 데이터가 데이터 공간에서 cluster를 형성한다고 가정해 보자. 그렇다면 입력 데이터 공간에서 clustering 알고리즘을 이용해 cluster를 분리 하고 labeled data를 이용해 각 cluster에 class를 부여 할 수 있다. 이 과정에서 데이터 공간상의 unlabeled data를 이용한다면 각 cluster의 경계를 더 잘 구분할 수 있을 것이다. 왜냐면 unlabeled data까지 활용 한다면 각 cluster에 속한 데이터의 분포를 더 정확히 추정할 수 있고 이는 곳 더 정확한 cluter 사이의 경계 추정을 할 수 있다는 의미 이기 때문이다.
여기서 한 가지 당연한 질문을 생각 할 수 있는데 "그럼 클러스터의 경계는 어디에 형성되는가?" 이다. 답은 "Low density region"이다.
Low density separation: The decision boundary should lie in a low-density region. 클러스터를 나누는 경계는 low-density 영역에 있어야 한다 는 말로 이는 cluster assumption과 동일한 의미로 받아 들일 수 있다. 왜 동일 한 의미로 받아 들일 수 있을까? low density separation을 부정해 보자. (엄격한 의미에서 논리 학적인 부정은 아닐 것 같다 더 잘 아시는 분이 있다면 댓글로 이 연결고리를 완성시켜 주시면 좋겠다.) 결정경계(decision boundary)가 high-density 영역에 놓인다면 결정 경계는 같은 클러스터에 속한 데이터를 서로 다른 class로 분류 하게 된다. 이는 같은 클러스터에 속한 데이터는 같은 클래스를 갖을 것이라는 cluster assumption을 부정 하게 되므로 하나를 부정하면 다른 하나도 부정되기 때문에 같은 말의 다른 표현이라고 할 수 있다.
smoothness assumption 과 cluster assumption의 차이 1. smoothness assumption은 입력 공간에서 인접한 데이터가 대체로 비슷한 출력을 갖는 경향이 있다는 가정이고 cluster assumption은 입력 공간에서 데이터 들이 군집(cluster)을 이루는 경향이 있다는 것이다. 2. smoothness assumption을 이용하면 레이블이 없는 데이터의 출력을 결정하기 위해 이웃하는 레이블이 있는 데이터를 활용할 수 있다. 3. cluster assumption을 이용 하면 레이블이 없는 데이터의 클래스를 결정하기 위해 주변 군집의 정보를 활용할 수 있다.
위 말을 자세히 보면 smoothness assumption은 입력 데이터의 관계와 출력 데이터의 관계가 서로 유사할 것이다 라고 만 말하고 있지 서로 다른 둘을 어떻게 분류 할지에 대한 정보는 담고 있지 않다. 반면 cluster assumption을 서로 다른 둘을 어떻게 분류 할수 있는지에 대한 가정을 담고 있다.
Manifold assumption
The high-dimensional data lie on a low-dimensional manifold
Manifold란 데이터의 내재된 구조를 나타내는 개념이다. 유사하게 데이터가 고차원에 존재할 경우 manifold란 데이터가 실재로 존재하는 저차원 하위 공간(subspace)을 나타 낼 수도 있다. Manifold learning이란 고차원 데이터를 저차원 manifold 공간으로 맵핑 하는 방법을 의미한다.
manifold assumption은 semi-supervised에서 왜 중요한가? high dimensional data의 문제는 연산량 증가, pairwise distance가 유사해 지며 데이터가 자체의 특성이 가려지는 문제 등이다. manifold는 그 개념 자체가 데이터의 내재된 구조, 그 구조를 잘 나타내는 저차원 공간을 나타내기 때문에 manifold에서 density와 distance등을 이용해 데이터 분포를 더 잘/쉽게 표현할 수 있다. 데이터 분포를 더 잘 표현 할 수 있으면 당연히 분포 모델링도 쉬워질 수 있다.
Transduction
transduction을 설명 하기 위해 induction을 먼저 설명해야 할거 같다. induction이란 귀납적 인것이다. 이는 supervised learing의 기저에 깔린 개념으로 특수한 케이스(학습 데이터 셋)와 그 라벨을 아는 상태에서 입력 데이터와 출력 라벨의 관계를 설명하는 일반적 규칙을 학습하는 것을 목표로 한다. 그 후 학습한 규칙을 unlabeled data에 대입해 label을 추론 한다.
transduction은 학습 과정에서 모든 관측치를 다 사용 한다. 즉 라벨이 있는 관측치든 없는 관측치든 모두 사용 하는 것이다. 모든 관측치를 사용해 공통된 특징, 패턴, 연관관계 등을 학습해 당장 풀고자 하는 목표 문제의 해답만을 찾는 것을 목표로 한다. 즉 일반적인 규칙을 학습하고자 하는 것이 아니다.
transduction 에 대한 개인 적인 의견 이렇게만 설명되어 있는 글들을 보다 보니 생긴 의문이 그럼 transduction은 너무 한정적인것 아닌가? 였다. 하지만 이는 transduction의 개념일 뿐이다. 어떤 것을 정의 하는 개념과 그것의 특성을 어떻게 사용(application) 할 것인지는 전혀 다른 얘기다. transduction이 unlabeled data를 포함한 사용 할 수 있는 모든 관측치를 이용해 당장 해결하고자하는 문제, 예를 들어 classification,의 최적 답을 찾고자 하는 개념이라면 이 문제를 푸는 과정에서 transduction의 개념을 이용하는 알고리즘은 앞서 말했듯이 labeled data와 unlabeled data 모두를 이용해 그들의 공통적인 성질, 특성등 즉 representation을 추출할 수 있다는 말과도 같을 것이다. 이 특성을 활용 하면 semi-supervised learning에서 transduction의 개념을 차용 할 수 있다.
(mit press의 semi-supervised learning에서는 transduction과 semi-supervised learning을 동일 한 것으로 보지 않는데 다른 책 또는 블로그에서는 transductive learning = semi-supervised learning이으로 용어를 정의해 설명하기도 해서 서로 다른 책과 블로그에서 설명이 약간 다를 수 있다.)
현업에서 일을 하다 보면 무한정 잘 어노테이션 된 데이터를 늘릴 수 없다. 모두가 잘 알듯 이는 비용과 시간이 어마어마 하게 들기 때문이다. 그래서 이를 극복하기 위해 semi-supervised learning을 도입하기로 했고 서베이 할때 읽은 논문들을 하나 씩 정리하고자 한다.
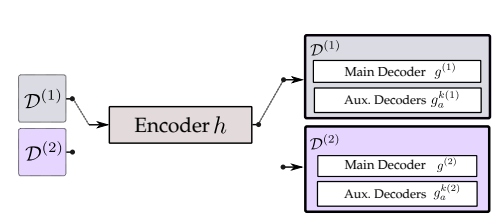
1. consistency를 이용하는 대부분의 method들은 입력 이미지에 서로 다른 변화를 적용하고 서로 다른 변화를 적용한 입력에 대해 네트워크 출력이 일정하도록 학습을 하는데 반해 이 논문은 encoder(또는 backbone)의 출력에 서로 다른 변화를 적용해 main decoder 와 axilary decoder의 입력으로 넣고 decoder의 출력이 일정하도록 학습을 시키는 방법을 제안한다. (axilary decoder 란 학습시에만 쓰이는 decoder로 목적은 encoder의 representation learning 능력을 향상시키는데 있다.)
2. Encoder의 출력인 feature map 에 적용할 다양한 종류의 변화(perturbation) 방법 을 제안하고 실험을 통해 효과를 보여준다.
3. 또한 weakly-labeld data(image level에서의 class 만 가지고 있는 데이터, 이미지넷 과같은 데이터를 생각하면됨)과 서로 다른 도메인의 pixel-level label이 있는 데이터셋을 사용하는 방법도 소개한다.
Method
저자가 입력 이미지가 아닌 encode 출력인 feature map 에 변화(perturbation)을 적용하기로 한 이유는 다음과 같다.
저자는 cluster assumption[참조]을 확인 하기 위해 입력 이미지의 특정 위치와 그 이웃 픽셀들 간의 유사성(거리)를 유클리디안 거리로 측정하고 대응 되는 라벨도 유클리디안 거리로 측정했다. 그 입력 이미지에서는 cluster assumption 이 잘 맞지 았다고 한다. 동일 한 실험을 encoder의 출력과 같은 hidden layer의 특정 위치와 그 이웃 위치들 그에 대응되는 라벨에도 대해 실행 했을 때 hidden layer의 출력인 feature space 에서 cluster assumption이 더 잘 들어 맞는 것을 확인했기 때문에 feature map에 perturbation을 적용하기로 결정했다.
아래 Fig 1 은 위 실험의 결과를 그려 놓은 것이다. (a)는 입력 이미지, (b)는 대응 라벨이다.
(c) 는 입력 이미지에서 지정된 위치와 그 이웃 위치간의 유클리디안 거리를 측정한 결과(실제 논문에서는 지정된 위치를 center로 하는 20x20 size의 patch 를 기준으로 이미지를 각 셀로 나누고 인접셀의 center 와 유클리디안 거리를 측정했다) (d)는 2048 dimension의 hidden representation space 에서의 지정된 위치와 그 이웃 위치간의 유클리디안 거리를 측정한 결과이다.
(c) 와 (d) 에서 검은 부분은 이웃 위치와 유클리디안 거리가 큰 것을 의미하는데 (d) 에서는 배경 클래스와 전경(강아지, 고양지, 양)등 클래스가 구분되는 곳이 주로 검은색(인접픽셀들과의거리가 먼)으로 나타나는 것이 확인되고 (c) 에서는 그런 경향성이 상대적으로 약하다. cluster assumption에 따르면 low density region에서 결정 경계(decision boundary)가 형성된다고 보기 때문에 (d) 의 실험결과가 cluster assumption을 지지하는 결과라고 할 수 있다.
Fig 1. cluster assumption in semantic segmentation
왜 검은색으로 표기된 영역이 low density region 인가? 혹시 위 글을 읽고 이런 의문이 생겼다면 이렇게 해석을 해보면 된다. low density 영역이란 data point 가 별로 없는 sparse 한 영역을 말한다. 말인 즉 해당 영역에서 특정 data point 까지의 거리가 멀다는 것이다. data point 가 어느 클래스에 속했는지와는 관계 없이 data point들 까지의 평균거리가 먼 위치 임의의 위치가 low density region 인것이다. 그리고 cluster assumption(low density assumption)에서는 이 공간에 결정 경계가 생성된다고 본다.
아래 그림은 논문이 제안하는 네트워크의 구조이다. 이 구조는 하나의 encoder(Shared Encoder, $h$)와 main decoder( $g$ ) 그리고 consistency를 강제 하기 위한 auxiliary decoder($g^{l}_{a}, ..., g^{K}_{a}$) 가 존재한다. auxiliary decoder 는 학습시에만 사용 되고 실제 inference time 에는 사용되지 않는다.
Fig 2. Model architecture
total loss는 아래와 같다.
$$ L = L_{s} + \omega_{u}L_{u} $$
$L_{s}$ 는 label 이 존재하는 데이터로 구한 cross entropy loss , 즉 supervised loss term이고
$L_{u}$ 는 unlabeled data를 이용해 구한 consistency loss 이다. $\omega_{u}$는 $L{s}$ 와의 밸런스를 맞추기 위한 텀으로 learning rate 처럼 학습 중 규칙에 따라 조절 된다.
$L_{s}$ 는 label 이 존재하는 데이터로 부터 구한 loss 이다. Fig 2 의 model architecture 에서 labeled example $X^{l}$ 이 입력으로 사용 될때 main decoder( $g$ )의 출력 $\hat{y}^{l}$과 label $y$를 이용해 cross entropy loss 를 구한 것이다. 논문에서는 이를 아래 식으로 표현했다.여기서 $f$ 는 encoder와 main decoder 를 포함한 network을 의미 하고 $H$ 는 cross entropy loss 이다.
이제 Unlabeled data를 어떻게 이용하는지 보자. 여기가 중요 포인트 이다.
Shared Encoder( $h$)의 출력을 $z_{i} = h(X^{u}_{i})$ 라 하자. 이 논문의 contribution 1 과 같이 저자들은 이 $z_{i}$ 에 작은 변화(pertubation) 을 적용해
각 auxilary decoder( $g^{l}_{a}, ..., g^{K}_{a}$) 입력으로 들어갈 $K$ 개의 서로 다른 $\tilde{z}^{a}_{i}, ... , \tilde{z}^{K}_{i}$ 를 생성한다.
이렇게 생성된 $\tilde{z}$ 들은 각 auxiliary decoder 의 입력으로 들어가게 되고 대응 되는 출력 $\hat{y}^{(l)}_{a}, .., \hat{y}^{(K)}_{a}$ 을 생성한다. auxiliary decoder와는 다르게 main decoder( $g$) 에는 변화가 적용되지 않은 순수한 encoder output 인 $z_{i}$ 가 입력으로 들어가 출력 $\hat{y}^{u}$ 를 생성한다.
auxiliary decoder의 출력 $\hat{y}^{(l)}_{a}, .., \hat{y}^{(K)}_{a}$은 main decoder의 출력을 target 으로 mean square error 를 이용해 학습 한다. 즉 auxiliary decoder 의 출력이 main decoder의 출력과 같아지는 것을 목표로 학습을 하는 것이고 이는 feature의 작은 변화에도 모델 안정적인 추론 성능을 갖도록 학습하는 것이다.
또한 main decoder의 출력은 target 즉 ground truth 로 활용 되므로 unlabeled data를 이용해 학습을 할때 main decoder의 weight 들은 학습 되지 않는다.
이를 수식으로 정리하면 다음과 같다.
이렇게 학습 하면 결과적으로 encoder 의 representation 능력을 강화 하는 방식으로 학습이 진행된다.
Perturbation
이제 shared encoder의 출력인 $z_{i}$에 어떤 변화(perturbation)을 적용해 auxiliary decoder의 입력으로 활용했는지 알아 보자. 글만 보면 정확히 파악하기 힘들수 있으니 각 perturbation을 구현한 저자의 코드를 같이 정리한다.
feature based perturbation:
이 타입의 perturbation 기법은 feature 에 noise를 더하거나 drop out 하는 것을 말한다.
F-Noise: feature 와 같은 dimension 을 가지는 noise tensor를 uniform distribution 으로 부터 추출하고 feature 더하는 방식이다.
class FeatureNoiseDecoder(nn.Module):
def __init__(self, upscale, conv_in_ch, num_classes, uniform_range=0.3):
super(FeatureNoiseDecoder, self).__init__()
self.upsample = upsample(conv_in_ch, num_classes, upscale=upscale)
self.uni_dist = Uniform(-uniform_range, uniform_range)
def feature_based_noise(self, x):
#바로 아래 라인이 uniform distribution 으로 부터 noise vector 를 추출하는 라인이다.
noise_vector = self.uni_dist.sample(x.shape[1:]).to(x.device).unsqueeze(0)
x_noise = x.mul(noise_vector) + x #feature 에 노이즈를 적용한다.
return x_noise
def forward(self, x, _):
x = self.feature_based_noise(x)
x = self.upsample(x)
return
F-dropout: feature map($z$)을 채널 축으로 summation 하고 normalization 해 $z^\prime$ 을 생성하고 0.6~0.9 사이의 random 값 $\gamma$ 를 threshold 로 정해 $\gamma$ 보다 작은 위치의 feature 를 0으로 만드는 방식이다. $M_{drop} = { z^\prime < \gamma}_{1}$ 로 0으로 만들 위치를 mask 로 만들고 $\tilde{z} = z x M_{drop} $ 과 같이 적용한다.
이 방식은 main decoder의 출력을 $\hat{y} = g(z)$ 이용해 object 가 차지하는 영역의 pixel을 변화시키거나 object 가 차지 하지 않는 영역을 변화시키기 위한 기법이다. object 내의 영역에 작은 변화를 일으키는 이유는 데이터셋에 존재하는 object의 특정 부위에 집중해 하거나, 특정 view angle 에서 바라본 object의 모습 등에 overfitting 되는 것을 피하기 위한 것으로 볼수 있다. object 이외의 영역을 변화시키는 mask 를 생성하는 이유는 학습 데이터셋에 존재하는 context information 로 인한 bias 를 줄이기 위한것으로 해석 할 수 있다.
context information 이란 "Context is a statistical property of the world we live in and provides critical information to help us solve perceptual inference tasks faster and more accurately" 이라고 할 수 있다. 우리가 사물을 인지 하는데 이용하는 정보로 object detection task 에서는 특정 object 가 있을 법한 "주위 환경 정보"를 임의의 object 클래스를 정하는데 활용 한다거나 학습 데이터 셋에 존재하는 object 들 간의 관계를 학습하는 것으로 볼수 있다. 예를 들으 밀림이라는 background에 호랑이가 있는 이미지가 학습데이터 셋에 많고, 집안 벽에 걸려 있는 호랑이 사진 또는 그림이 있을 경우 "집안의 가구와 같이 있는 호랑이 이미지"가 주어졌을때 호랑이 자체가 아닌 호랑이와 주변 가구 사이의 관계를 이용해 "호랑이 사진/그림" 으로 prediction 하게 된다던지 하는 것이다.
guided masking: main decoder의 출력을 이용해 object 가 차지하는 영역에만 perturbation 을 적용하거나 object 이외의 context 에만 perturbation 을 적용하는 방식이다. 아래 코드에서 pred 는 main decoder의 출력이다.
guided cutout: object 의 특정 부분에 의존적으로 추정하는 것을 방지하기 위해 object 영역내 임의의 위치를 0으로 만드는 perturbation을 적용한다. segmenation map으로 부터 object의 contour를 찾고 이를 이용해 bounding box 를 만든다 그리고 bouding box 내의 임의 사격형 영역을 0으로 만든다.
Intermediate VAT: inference 를 가장 혼란 스럽게 만들 수 있는 변화를 feature 에 적용 하는 방식으로 virtual adverserial training을 응용했다. VAT에서는 noise 를 샘플링 한 후에, 해당 noise 를 더한 값과 기존의 값의 차이(KL-div)의 gradient 를 이용해 noise 를 생성한다.(todo: 부분은 따로 정리 할 것.)
def get_r_adv(x, decoder, it=1, xi=1e-1, eps=10.0):
"""
Virtual Adversarial Training
https://arxiv.org/abs/1704.03976
"""
x_detached = x.detach()
with torch.no_grad():
pred = F.softmax(decoder(x_detached), dim=1)
d = torch.rand(x.shape).sub(0.5).to(x.device)
d = _l2_normalize(d)
for _ in range(it):
d.requires_grad_()
pred_hat = decoder(x_detached + xi * d)
logp_hat = F.log_softmax(pred_hat, dim=1)
adv_distance = F.kl_div(logp_hat, pred, reduction='batchmean')
adv_distance.backward()
d = _l2_normalize(d.grad)
decoder.zero_grad()
r_adv = d * eps
return r_adv
class VATDecoder(nn.Module):
def __init__(self, upscale, conv_in_ch, num_classes, xi=1e-1, eps=10.0, iterations=1):
super(VATDecoder, self).__init__()
self.xi = xi
self.eps = eps
self.it = iterations
self.upsample = upsample(conv_in_ch, num_classes, upscale=upscale)
def forward(self, x, _):
r_adv = get_r_adv(x, self.upsample, self.it, self.xi, self.eps)
x = self.upsample(x + r_adv)
return x
random perturbations:
가장 단순한 형태로 drop out을 이용한다.
class DropOutDecoder(nn.Module):
def __init__(self, upscale, conv_in_ch, num_classes, drop_rate=0.3, spatial_dropout=True):
super(DropOutDecoder, self).__init__()
self.dropout = nn.Dropout2d(p=drop_rate) if spatial_dropout else nn.Dropout(drop_rate)
self.upsample = upsample(conv_in_ch, num_classes, upscale=upscale)
def forward(self, x, _):
x = self.upsample(self.dropout(x))
return x
Avoiding overfitting
라벨이 있는 데이터가 라벨이 없는 데이터 보다 적은 상황에서 각 iteration 마다 동일한 크기의 label, unlabeled 데이터를 추출해 학습하므로 label 이 있는 데이터가 실제 학습에 중복되어 사용되기 때문에 overfitting 이 발생할 수 있다. 이를 방지 하기 위해 bootstrapped-CE(ab-CE, CE=cross entropy)를 사용했다.
$f(x^(l)_{i})$ 은 라벨이 있는 데이터 $x$ 에 대한 모델의 출력으로 모델이 $x^(l)_{i}$가 특정 클래스에 속할 활률을 $\eta$ 로 추측하는 pixel들만 supervised loss 계산에 사용 하겠다는 의미이다. 즉 모델이 이미 $\eta$ 의 확신을 가지고 추론한 pixel 은 더 이상 학습에 이용하지 않음으로서 overfitting 을 방지하겠다는 전략이다.
결론
학습과 관련된 정확한 정보는 논문을 참조하기로 하고 결론을 보자.(wealky-labeled data, joint leraning of difference domain data 에 대한 것은 결론 이후에 정리한다.)
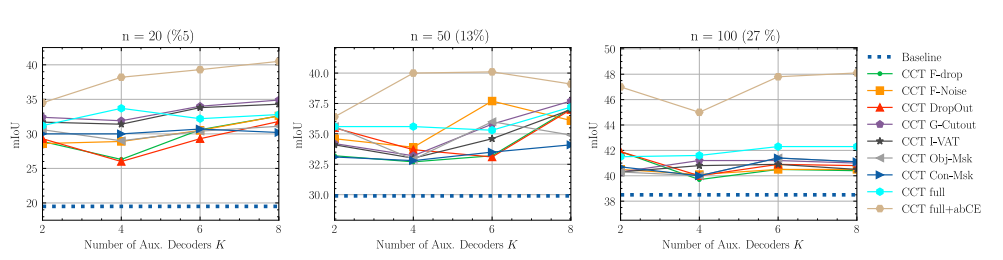
Fig 3. Ablation studies on camvid with 20, 50 and 100 labeled imagesFig 4. Ablation study on PASCAL VOC
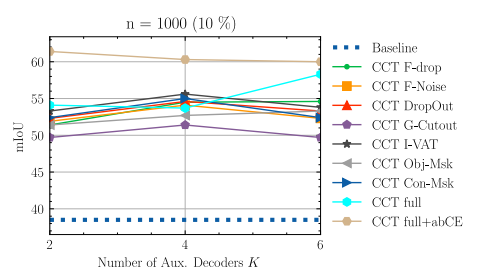
Fig 3은 camvid 데이터 셋에서 라벨이 있는 이미지를 각각 20, 50, 100장 사용해 unlabeled data 와 학께 학습한 결과이고 Fig4는 PASCAL VOC에서 1000장의 라벨이 있는 이미지와 unlabeled data 데이터를 이용해 학습한 결과이다.
Fig 3에서 보면 당연하게도 label 이 있는 데이터의 사용량이 증가 할 수록 baseline miou가 20, 30, 38.x 와 같이 증가하는 경향성을 갖는다는 것을 알수 있다. x측은 특정 타입의 auxiliary decoder를 몇개 사용 했는지를 나타내는데 K =2 이라면 CCT F-dop의 경우 F-drop type의 auxiliary decoder를 2개 사용, K=4 이면 해당 타입 decoder 를 4개 사용 했다는 의미이다. CCT full은 위에 소개된 perturbation을 적용한 decoder 를 모두 사용 한 경우 이고 이 경우 K=2라면 F-noise decoder 2개, F-drop decoder 2개, gropout decoder 2개, G-cutout(guided cutout) decoder 2개, VAT(virtual adverserial training) decoder 2개, object mask decoder 2개, context mask decoder 2개 등 총 number of perturbation x K 개의 decoder 를 사용해 학습 했다고 해석 하면 된다. CCT full +abCE 는 모든 종류의 perturbation을 사용하고 bootstrapped -CE를 함께 사용한 결과이다.
camvid dataset 실험결과의 경우 모든 종류의 perturbation을 다 사용하고 각 perturbation type의 decoder 개수가 많아 질수록 성능이 좋아진다. PASCAL의 경우 모든 perturbation type을 사용하고 bootstrapped -CE 까지 사용 할 경우 K=2 일 때 성능이 가장 우수 했다.
전반적인 결과는 논문에서 제안한 feature perturbation 방식과 consistency loss 를 사용 할 경우 라벨이 있는 데이만 사용 할때 보다 더 좋은 성능을 낼수 있는 것으보인다.
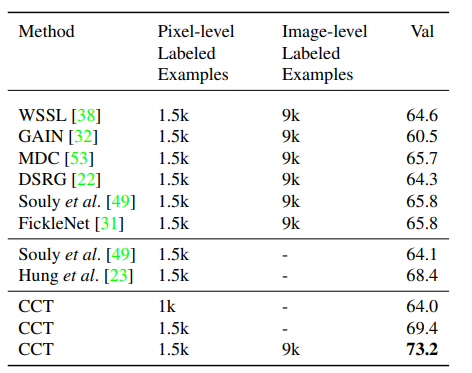
Fig 5.state-of-the-art 들과 비교
Fig 5는 다른 state-of-the-art 방법들과 PASCAL VOC 데이터를 이용해 학습한 결과를 비교한 표인다. 이 논문에서 제안한 CCT 방식이 성능이 가장 좋았다는 결과이다.
Use weak-labels
이 논문에서는 weak-label data 를 이용하는 방법에 대해서도 다루고 있다. 간단하게만 살펴 보자.
weak label 은 이미지 레벨에서 어떤 object 가 있는지에 대한 정보가 있는 상태로 정의 된다. 이미지넷 데이터 셋을 생각해보자. 이를 이용해서 특정 object에 대한 부가 적인 표현 정보(representation)을 encoder가 학습 할 수 있게 만드는게 목표 이다.
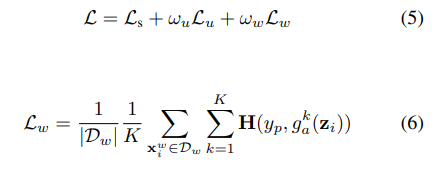
이를 위해 사전학습 된 encoder 와 classification branch를 이용한다. classification branch를 이용해 class activation map을 생성하고 이 map 에서 activation score 가 특정 threshold $\theta_{bg}$(논문에서는 0.05) 미만 이면 background class , 특정 threshold $\theta_{fg}$ (논문에서는 0.3) 초과면 weak-label 에 해당하는 foreground class 로 간주해 pseudo ground truth map($y_{p}$) 을 생성하고 이 pseudo ground truth map 에 dense CRF 를 적용해 한번더 정재 한 후 이를 auxiliary decoder 학습에 사용한다.
$L_{w}$가 weak label data를 이용한 weakly supervised loss 이고 $g^{k}_{a}$는 auxiliary decoder, $z_{i}$는 encoder output, $y_{p}$는 class activation map 기반의 pseudo gt 이다.
Cross-consistency traning on mutiple domains
이번엔 다른 도메인의 label-unlabeled data set 을 이용해 학습 하는 방법이다. 굉장히 쉽고 직관적인 아이디어 이다.
사실 다음 그림으로 이미 설명이 끝난다.
서로 다른 도메인의 data set $D^{(1)}, D^{(2)}$ 를 이용하는데 $D^{(*)} = { D^{(*)}_{l} \cup D^{(*)}_{u} }$ 로 $ D^{(*)}_{l} $ 는 도메인 *에 속한 라벨이 있는 데이터 $ D^{(*)}_{u} $ 은 도메인 *에 속한 라벨이 없는 데이터 이다.
이 두 도메인 데이터를 이용해 학습하는데 encoder $h$ 는 공유 하고 각 도메인의 main decoder과 auxiliary decoder를 따로 따로 사용해 학습을 진행한다. 이렇게 하면 두 도메인의 데이터를 모두 이용해 encoder 가 특정 object의 representation 을 학습하는데 도움이 된다고 한다.
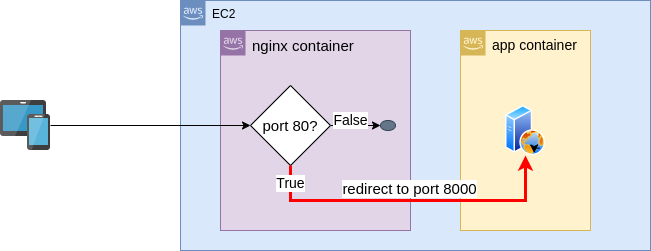
이렇게 설정하면 80번 포트로 들어오는 요청이 8000 번으로 redirect되기는 하지만 AWS ec2 인스턴스의 보안 정책에서 8000 번포트를 오픈해야만 app_server 가 요청을 정상적으로 받을 수 있었다.
즉 아래 Fig 1의 붉은 선 처럼 nginx 가 요청을 외부에서 들어오는 8000번으로의 요청 처럼 리다이렉트 하는 것으로 보인다.
Fig 1. nginx 동작
이렇게 하면 ec2 인스턴스의 8000번 포트를 오픈해야 해서 불필요하게 보안 위험이 증가하고 nginx 가 app server 로 들어가는 모든 요청을 관리하게 하는 계획과는 많이 달라진다.
목표 아키텍쳐
원래의 내 계획은 app server 로의 요청은 반드시 80 번 포트로 들어와 nginx를 거쳐 app server 로 가게 하는 것이었다. 이를 위해 docker network를 이용해 nginx continer 와 app container 사이의 일종의 private network 를 구성했다. 전체 아키텍쳐는 아래 Fig 2 와 같다. Fig 1과 비교해 보면 redirect to port 8000 을 의미 하는 붉은 색 선이 ec2 인스턴스 밖으로 나가지 않고 nginx container 와 app container 사이에 존재 한다. 이렇게 하면 ec2 인스턴스의 보안 그룹에서는 8000port 를 오픈할 필요가 없어 보안 위험을 줄일 수도 있고 계획 대로 80번 포트로 들어오는 요청만 nginx를 거쳐 app server 에 전달하는 것이 가능해 진다.
Fig 2. 목표 요청 처리 아키텍쳐
이를 위한 nginx 및 docker compose.yml 예시를 아래 추가 했다. 주석과 함께 보면 이해하기 쉽다. 간단히 말하면 docker-compose.yml 에서는 nginx container 와 app server conatiner 간의 private network 구성을 위해 networks 예약어를 이용해 backend 라는 네트워크를 추가했다. 이렇게 하면 docker의 네트워크 기능을 이용해 두 컨테이너 간 통신이 가능해 진다. 그리고 nginx 에서는 myapp.com의 80 번 포트로 오는 요청 만 app 이 동작하는 app server 서비스의 8000 번 포트로 redirect 하도록 설정 했다. 이때 nginx 의 upstream 의 server 에는 app이 동작하는 서비스의 이름 (docker-compose.yml 에서 app을 실핸 하기 위해 설정 한 service 이름)을 입력해야 한다.
new nginx 설정
upstream jnbdrive_app{
server app_server:8000; ## docker-compose.yml의 app_server 서비스 네임
}
server {
listen 80;
server_name myapp.com; ##client 가 접속하는 도메인네임, 장고 app 의 서버 주소
# redirect https setting
location = /favicon.ico { access_log off; log_not_found off; }
location /static {
alias /home/nginx/www/static;
}
location / {
include proxy_params;
proxy_pass http://myapp.com;
}
}
이번 포스트에서는 AWS ELB application load balancer를 이용해 SSL을 적용 하는 방법을 정리한다.
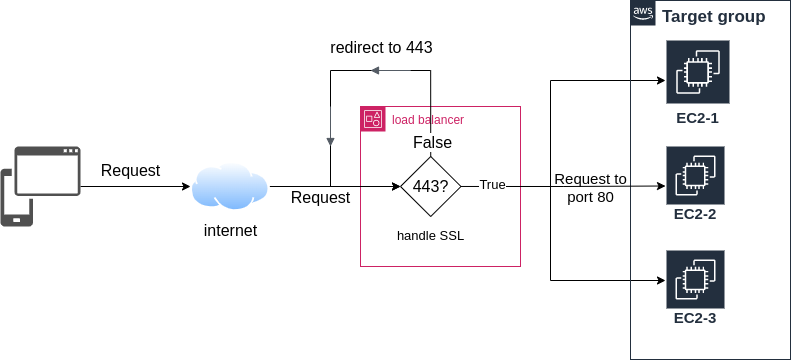
즉 이 포스트의 목적은 아래 Fig 1과 같은 architecture 로 서버 운영 구조를 완성하는 것이다.
이 구조를 간단히 설명 하면 서버로 request 가 들어오면 load balancer는 요청이 https(port 443) 요청인지 확인한다. 만약 http(port 80) 요청이면 load balancer 가 이 요청을 https 로 redirection 한다. https 요청이면 load balancer 가 SSL session 의 종단점 역할을 대신해 요청을 decryption 해 target group 의 80 번 포트로 요청을 forwarding 한다. 이렇게 구성 하면 ec2 인스턴스에서 실행 중인 server가 ssl decryption 을 수행 하지 않아도 되니 조금더 가벼워 질수 있다.
t2.micro 인스턴스인 내 서버의 짐을 줄여 주기 위한 시도이다.
Fig 1. application load balancer를 이용한 SSL 적용 구조
aws ELB application load balancer 를 이용해 SSL을 적용하기 위한 순서는 아래와 같다.
내 경우 django app 에 SSL 을 적용하기 위한 것으로 ec2 인스턴스는 이미 생성한 것을 이용한다.
순서
1. ACM(amazon certificate manager) 에서 SSL 인증서 발급 및 호스팅 영역에 레코드 등록
2. Target group 생성
3. application load balancer 생성 및 security 정책 설정(
4. route53의 domain A 레코드 변경
ACM(amazon certificate manager) 에서 SSL 인증서 발급 및 호스팅 영역에 레코드 등록
aws에는 amazon certificate manager 줄여서 ACM이 라는 서비스가 존재 한다.
acm 콘솔로 이동하기 위해서는 'aws console -> 검색 창에서 certificate manager' 검색 -> cerificate manager 클릭 하면 된다.
acm 은 ssl/tsl 인증서 발급이 가능 한데 나는 이중 ssl 인증서 발급을 요청했다.
참고로 ssl 인증서를 발급받기 위해서는 DNS 검증이나 이메일 검증이 필요한데 여기서는 DNS 검증 방식을 사용 한다. 즉, 등록된 domain 이 있어야 한다는 의미이다.
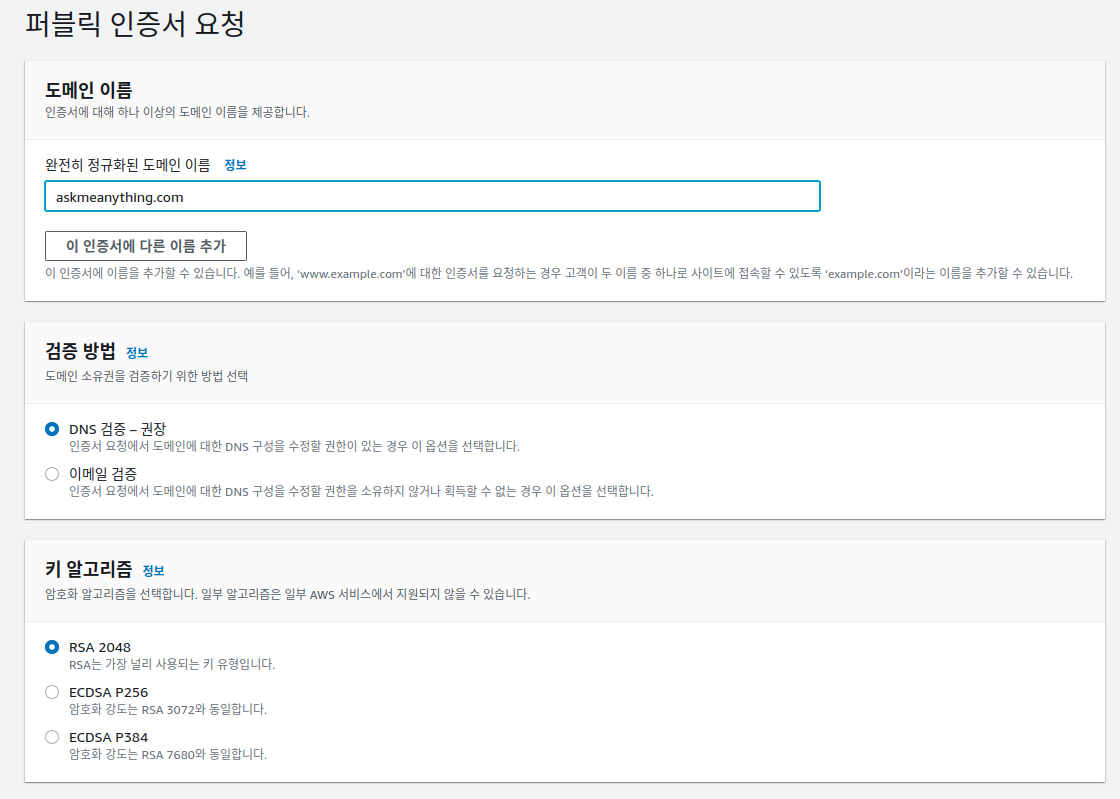
다음과 같은 화면 이 나오는데 도메인 이름에는 ssl을 이용해 통신을 암호화 하고자 하는 domain 을 입력한다. 예를 들어 내 웹페이지의 주소가 askmeanything.com 이라 하면 이 주소를 입력하면 된다. 검증 방법은 DNS 와 이메일 검증이 있는데 DNS 검증을 추천한다. 다만 DNS 인증을 이용하기 위해서는 askmeanything.com 이 DNS 서버에 등록이 되어있어야 한다. DNS 서버에 domain 을 등록 하는 방법은 [aws]ec2 인스턴스 도메인 연결을 참조하자.
키 알고리즘은 원하는 걸 선택하면 된다.
Fig 2. 퍼블릭 인증서 요청
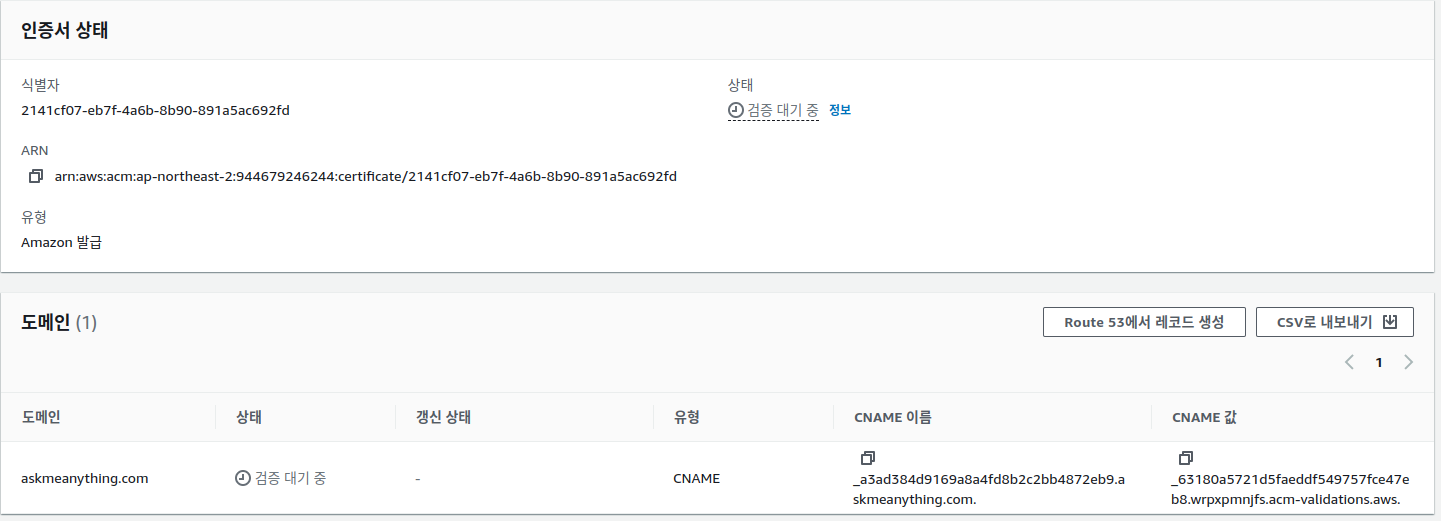
옵션을 다 선택하고 "요청"을 누르면 인증서가 생성된다. acm 콘솔에서 "인증서 나열" 에 들어가 방금 생성한 인증서를 클릭하면 다음과 같은 화면을 볼 수 있다.
Fig 3. 인증서 상태
우측 위에 "상태"를 보면 "검증 대기 중" 이라고 나오는데 인증서 생성시 등록한 domain 에 대한 소유권 검증이 끝나지 않았기 때문에 다. 검증을 마치기 위해서는 Fig 3. 인증서 상태 페이지에서 아래 순서를 따라하자.
4. "도메인 -> Route53에서 레코드 생성" 클릭
5. "Amazon Route 53에서 DNS 레코드 생성" 페이지 에서 SSL 인증서를 등록하고자 하는 domain 선택 및 레코드 생성 클릭.
이 과정에서 askmeanythin.com 호스팅 영역에는 CNAME 레코드가 추가 된다. CNAME 사용자가 도메인을 통제함을 증명하는 키-값 페어가 포함되어 있다. CNAME 레코드에 대한 자세한 설명은 이 페이지를 참조하자.
6. route53 에 5번에서 생선한 cname 레코드가 생성되고 시간이 좀 지나면 Fig2. 인증서 상태가 active 로 바뀐다. (얼마의 시간이 걸리는지는 정확하지 않은것 같다. 나의 경우 23:00 에 등록을 했고 20분이 지나도 상태가 바뀌지 않아 자고 일어났더니 바뀌어있었다.)
Target group 생성
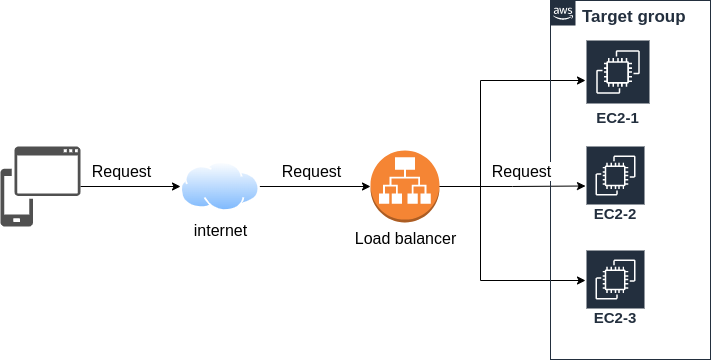
Fig 4. Load balancer 동작
Target group은 AWS ELB 로드벨런서가 요청을 route 하는 대상의 집합이다. 요청을 처리 할수 있는 lambda 나 ec2 instance등이 target group 에 속할 수 있다. Fig 4. 을 보면 load balancer는 외부로 부터 들어 오는 요청을 target group 에 속한 ec2-2 로 route 한다.
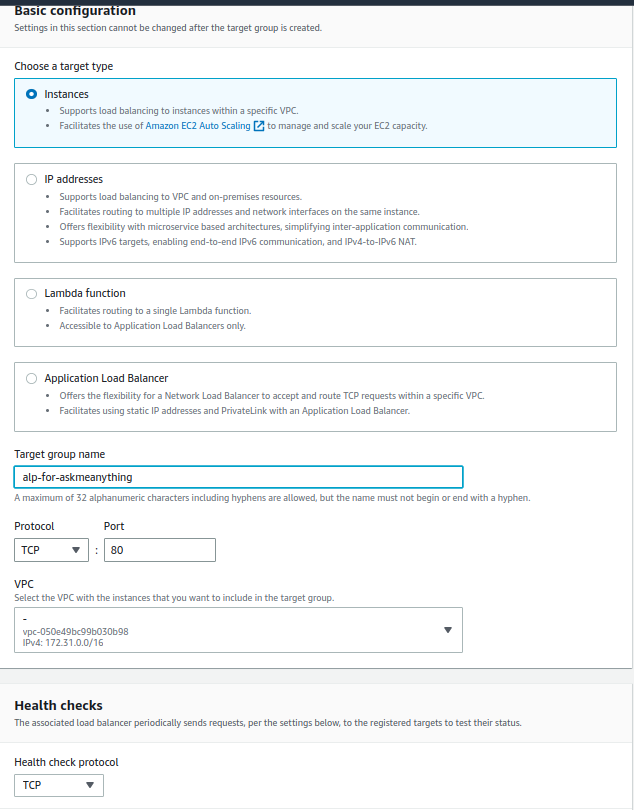
대상 그룹 생성을 위해서는 "ec2 콘솔 -> 로드벨런싱-> 대상 그룹" 페이지에서 우측 위에 있는 "create target group" 버튼을 누르면 된다. 버튼 클릭하면 Fig 5와 같은 페이지를 볼 수 있다. 나의 경우 ec2 인스턴스에 요청을 route 하는게 목적이므로 target type을 "instances"로 선택했다.
Target group name에는 식별하기 쉬운 이름을 입력하자. 이 이름으로 load balancer 를 만들때 target group을 선택할 것이다. VPC 는 이 target group에 포함 시킬 ec2 인스턴스들이 할당된 VPC와 같은 것으로 선택한다. 이게 다르면 통신이 되지 않는다.
Fig 5. target group 생성 페이지
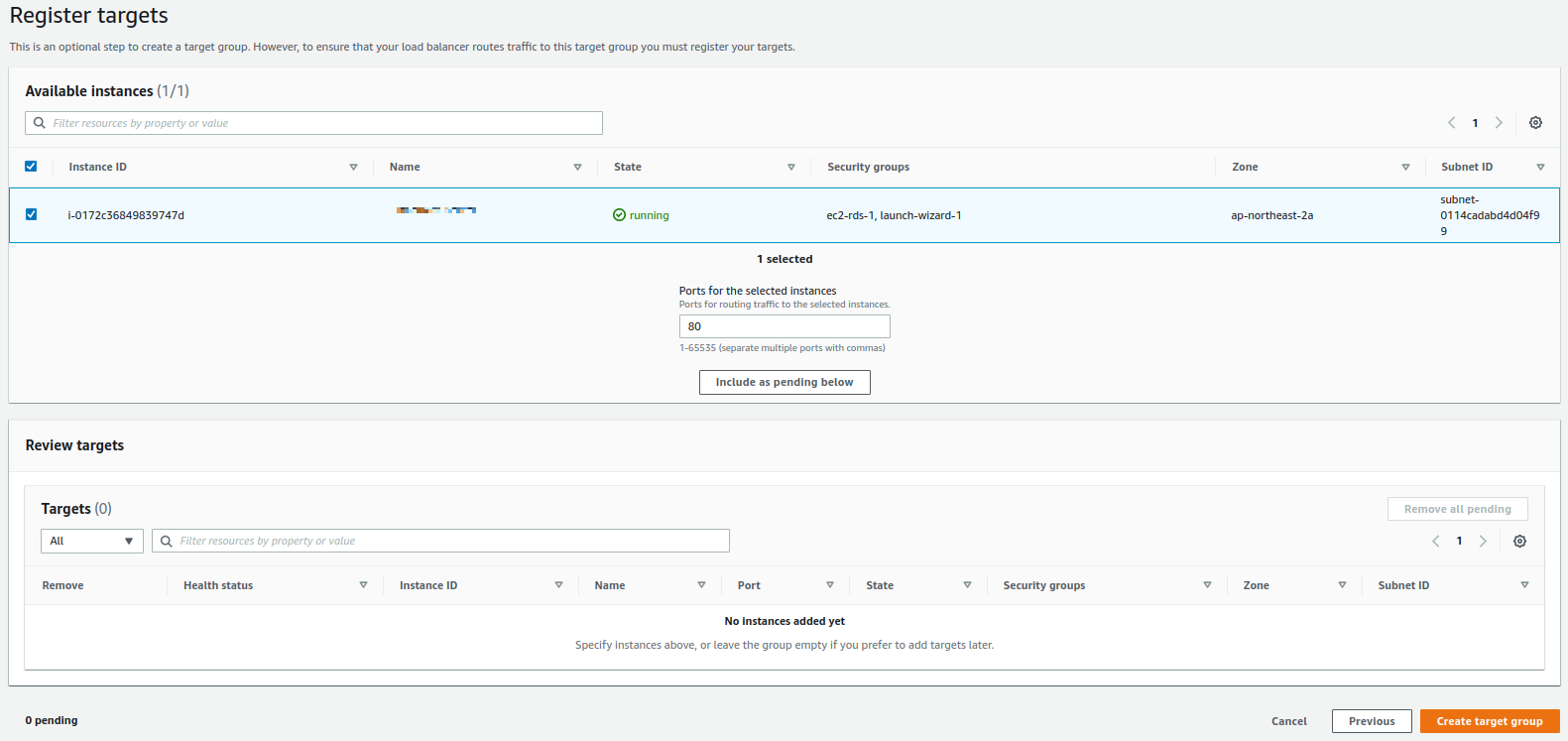
생성을 클릭하고 나면 다음과 같은 페이지가 보인다. 이 과정이 실질적으로 방금 만든 target group에 요청을 처리할ec2 인스턴스를 추가하는 과정이다. 추가하고자 하는 ec2 인스턴스를 선택하고 해당 인스턴스의 어떤 port로 요청을 routing 할지 정하고 "Include as pending"을 클릭하면 된다.
아래 그림에서는 선택한 인스턴스의 80번 포트로 요청을 routing 하도록 설정했다.
application load balancer 및 security 정책 설정
AWS ELB application load balancer 는 클라이언트에 단일 접속점을 제공하고 로드밸런싱을 수행한다. 무슨 말이냐면 같은 서비스를 제공하는 물리적인 서버가 여러개 있을때 이 서버들은 서로 다른 IP를 가지고 있을 수 있다. 클라이언트가 이 서버들 중 하나에 의해 서비스를 받기 위해서는 해당 IP에 접근을 해야 한다. 접근한 서버가 매우 바쁜고 다른 서버는 놀고 있다면 서비스의 가용성은 떨어지게 된다. 그렇다고 사용자가 어떤 서버가 놀고 있는지 일일이 모니터링 해서 덜 바쁜 서버에 접근 할 수도 없고 그렇게 한다고 해도 동일 한 서비스를 받기 위해 서로 다른 서버의 IP를 이용해 접근하는 것도 매우 불편하다. (극단적인 예로 설명 하다 보니 서버의 IP 로 접근한다고 표현했는데 domain을 사용하기 때문에 이렇게 되진 않는다)
application load balancer는 이런 상황에서 해법을 제공한다. 동일한 서비스를 제공하는 여러 물리 서버를 target group으로 묶고 이 target group으로 가는 모든 요청을 application load balancer가 받아서 target group 에 정해진 정책에 따라 업무를 배분한다. 사용자 입장에서는 서비스를 제공하는 각 서버의 IP 를 몰라도 되고 application load balancer의 IP 나 domain만 알면된다. 또한 load balancer 가 서버에 업무를 분배하므로 어떤 서버가 덜 바쁜지 모니텅링 할필요도 없다.
또한 application load balancer를 이용 하면 이 포스트의 목적이었던 암호화된 통신 SSL 을 적용 할 수 있다. Fig 1 에서 처럼 암호화 되지 않은 요청이 application load balancer 로 도착하면 암호화 된 통신을 위해 이 요청을 https(port 443)으로 redirection 한다. 요청이 암호화된 요청이면 application load balancer 가 SSL 연결의 종단점 역할을 수행해 암호화된 요청을 해독하고 해도된 요청(request)를 target group의 80번 포트로 포워딩한다. 이렇게 되면 서비스를 제공하는 서버들은 요청을 해독하는데 자원을 할당하지 않아도 되는 장점(?)이 있다.
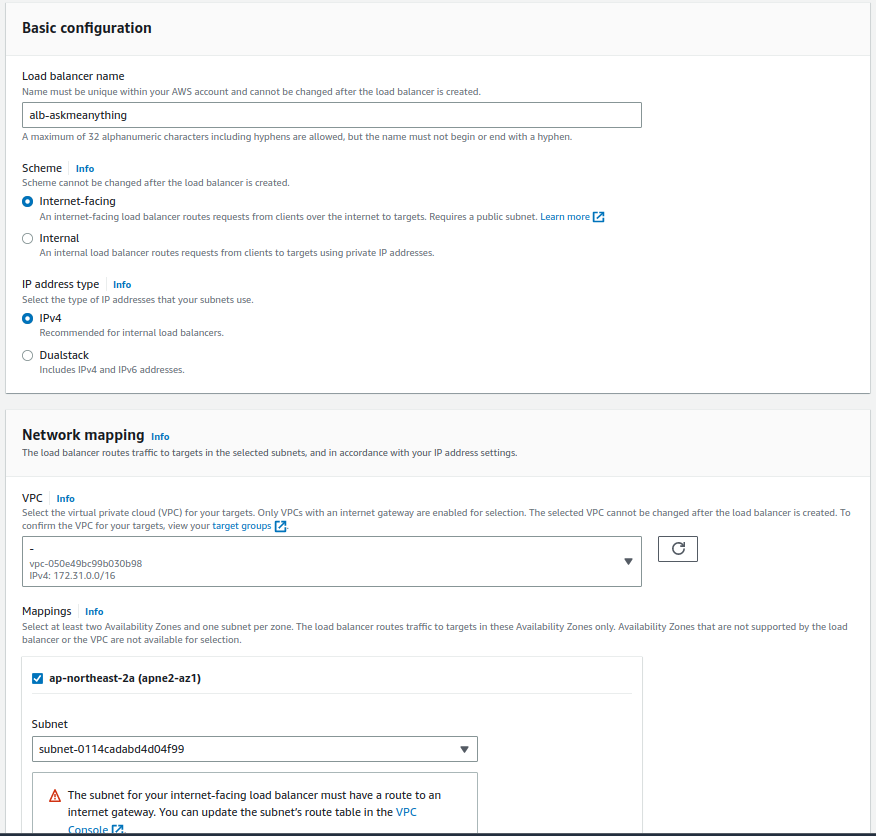
이제 application load balancer 를 생서하는 방법을 알아 보자. "ec2 콘솔 -> 로드 밸런서" 페이지에 들어가 우측 상단의 "create load balancer"를 클릭한다. "Select load balancer type" 페이지에서 application load balancer 를 선택한다. 그럼 아래 Fig 7 과 같은 페이지를 볼 수 있다.
Fig 7. Load balancer 설정 페이지
외부에서 들어오는 요청을 받아서 처리하는게 목적이므로 Basic configuration 의 scheme 에서 "internet-facing"을 선택한다. IP address type은 IP4 를 선택했다. 요즘은 IPv6가 많으니 실제 서비스를 위해서는 Dualtask 를 선택하는게 적절할거 같다. (나는 처음엔 IPv4 를 선택했다 나중에 dualstask으로 변경했다.)
Network mapping 에서는 target group 에 속한 ec2 인스턴스들이 속해 있는 VPC 와 같은 것을 선택하면 된다. Mappings 는 target group 에 속한 ec2 인스턴스의 가용영역(ec2 인스턴스 네트워크 페이지에서 확인가능)을 확인해 동일 한 것을 선택하면 된다. 최소 두개 선택하게 되어있는데 나의 경우 ec2 인스턴스의 가용영역인 ap-northeast-2a와 ap-northeast-2b (apne2-az2) 를 선택했다.
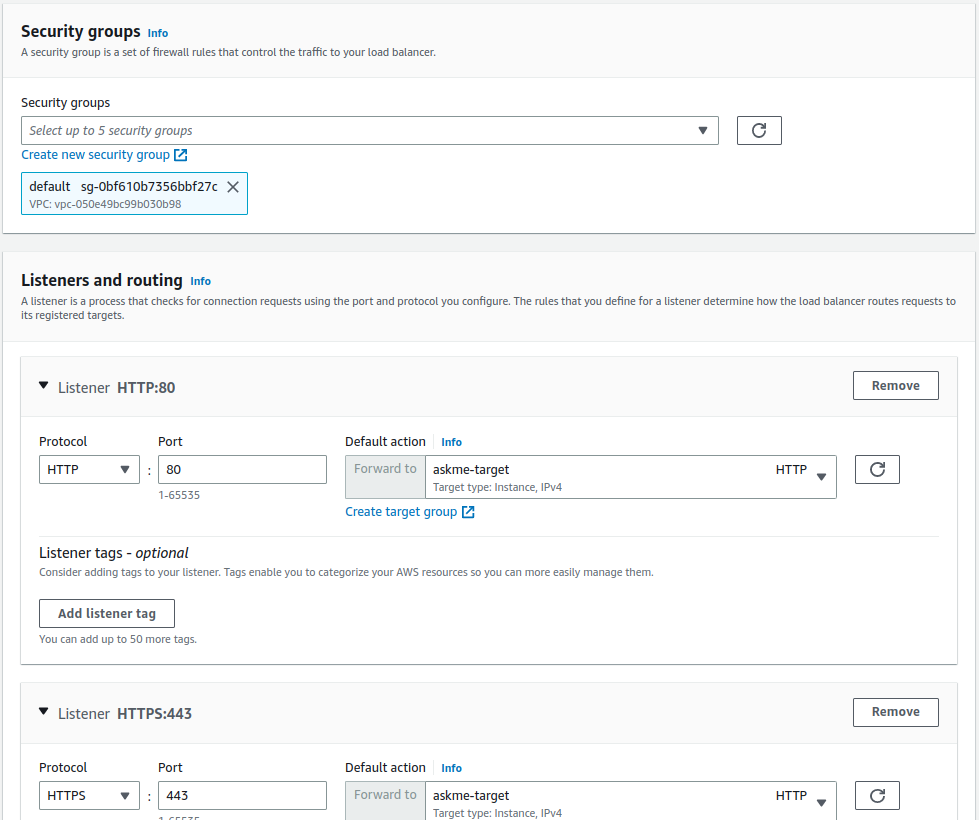
다음으로 Fig 8 처럼 security groups과 listener 정책을 설정한다. Security group(보안그룹)은 임의의 protocol과 port로의 요청을 어떻게 처리 할것인지 에 대한 규정을 담고 있다. ec2 인스턴스와 동일한 정책을 사용하기 위해서는 ec2 인스턴스에 할당한 보안그룹을 선택해도 된다. 나는 target group에 속한 ec2 인스턴스와는 다른 보안정책을 설정 하기 위해 default로 두었다.
listeners and routing은 생성중인 application load balancer 가 몇번 port로 들어오는 어떤 protocol의 요청을 어떻게 처리 할지 설정하는 것이다. Fig 8에서는 80번 포트로 들어오는 http 요청과 443 번 포트로 들어오는 https 요청에 대해 default action 으로 이전 섹션인 "Target group 생성" 단계에서 생성한 target group 으로 요청을 forwaring 하도록 설정 했다. 하지만 이렇게 설정해 놓으면 Fig 1에서 80번 포트로 들어오는 비암호화된 요청을 암호화된 요청으로 redirection 하고자 하는 계획과 다르므로 잠시 후 80번 포트로 들어오는 http 요청에 대한 routing 정책을 을 변경 할 것이다.
Fig 8. 보안 그룹 및 리스너 세팅
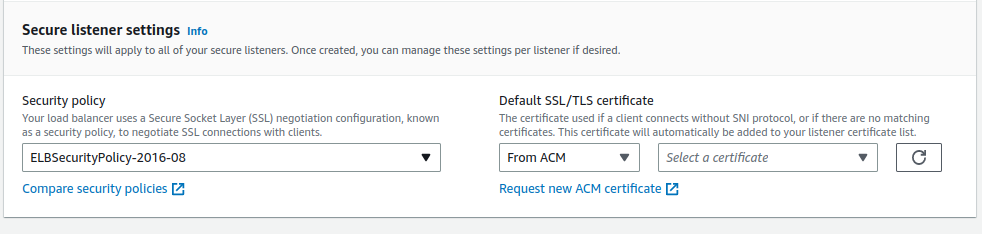
application load balancer 의 생성단계는 거의 다 되었다. 443 번 포트로 들어오는 https 요청에 대한 listener를 등록 하면 아래와 같이 "Secure listener settings" 이라는 추가 설정 섹션이 생긴다. SSL 통신을 위한 certification 을 선택하라는 것인데 "ACM(amazon certificate manager) 에서 SSL 인증서 발급 및 호스팅 영역에 레코드 등록" 에서 생성한 인증서를 선택하면 된다. 이렇게 설정 하면 application load balancer 가 SSL 통신의 종단점 역할을 수행 할 수 있다. 인증서 선택 말고도 왼쪽에 "SEcurity policy"를 선택하는 란이 있는데 나는 이에 대한 지식이 부족해 일단 default 로 두었다.
FIg 9. SSL 인증서 선택
여기 까지 설정 하고 생성을 누르면 application load balancer 가 생성된다. "ec2 콘솔 -> 로드 밸런서" 페이지에 들어가면 생성한 application load balancer 를 볼 수 있다. 생성한 로드 밸런서의 "state" 가 Active라면 잘 생성되어 실행 중인 것이다. 하지만 몇번 만들어 본 결과 만들고 바로 확인 하면 "state" 가 "provisioning" 으로 나온 일종의 준비중 이라는 상태로 10분 정도 기다리면 Active 상태로 바뀐다.
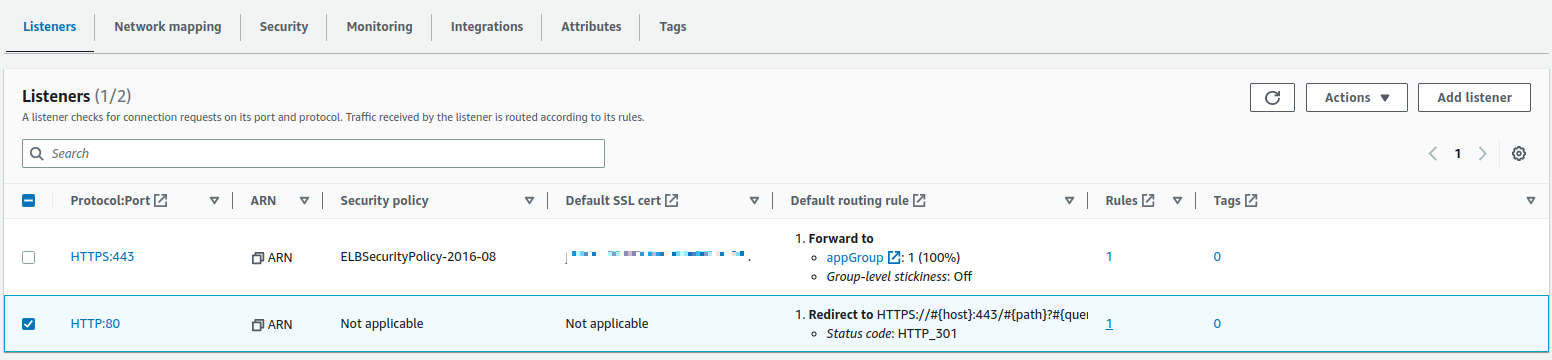
다음으로 80번 포트로 들어오는 http 요청을 어떻게 처리 할지에 대한 정책을 바꿔야 한다. 80번 포트는 http 요청으로 비보안이므로 이 요청을 https 요청으로 redirect 하도록 할 것이다. 위에서 application load balancer의 Listener 를 설정 할때 80 번 포트로 들어오는 요청에 대해 target group 으로 포워딩 하게 했기 때문에 이를 바꿔 주어야 한다. "ec2 콘솔 -> 로드 밸런서" 에서 생성한 로드 밸런서를 선택하고 아래 Fig 10처럼 Listener 상세 페이지에서 80번 포트 리스너의 Rules 값을 클릭한다. Fig 10 로드 밸런서 상세
리스너 상세 페이지에서 우상단에 있는 manage ruls를 클릭한다. 아래 Fig 11 처럼 80번 포트에 대한 규칙을 리디렉션으로 바꾸고 대상을 HTTPS 로 하고 저장한다. 이렇게 설정 하면 80번 포트로 오는 요청을 443 번의 HTTPS 로 리디렉션 하게 된다.
Fig 11. 리스너 규칙 변경 페이지
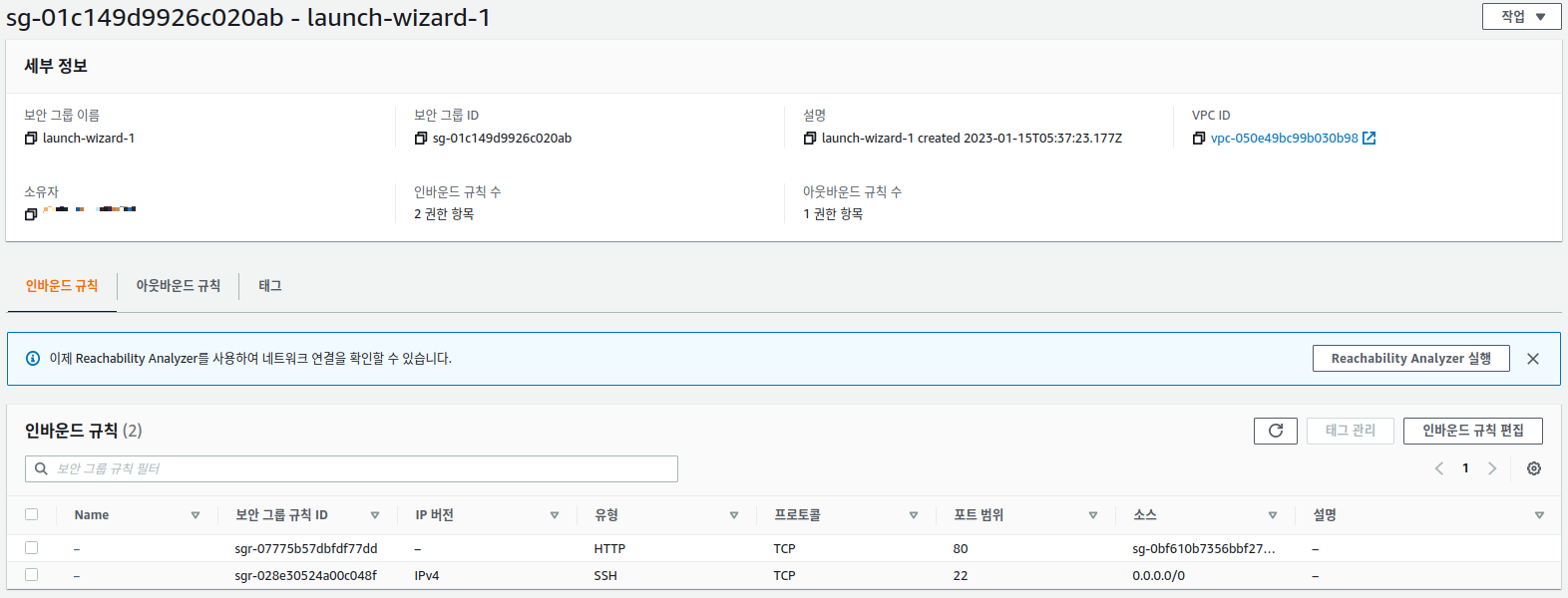
다음으로 할일은 load balancer에 할당된 보안 그룹에서 로드 밸런서의 리스너 포트를 오픈하는 것이다. 로드 밸런서 생성시 리스너를 등록 했다고 보안 그룹에서 해당 포트가 자동으로 오픈되지 않는다. 나는 이걸 몰라서 약 3시간을 디깅했다. 로드 밸런서에 할당된 보안 그룹 페이지로 들어가 아래 Fig 12 같이 인바운드 규칙을 바꾼다. 80, 443 번 이외의 포트를 허용 하고자 한다면 해당 포트도 추가 한다.
Fig 12 로드 밸런서 보안 규칙
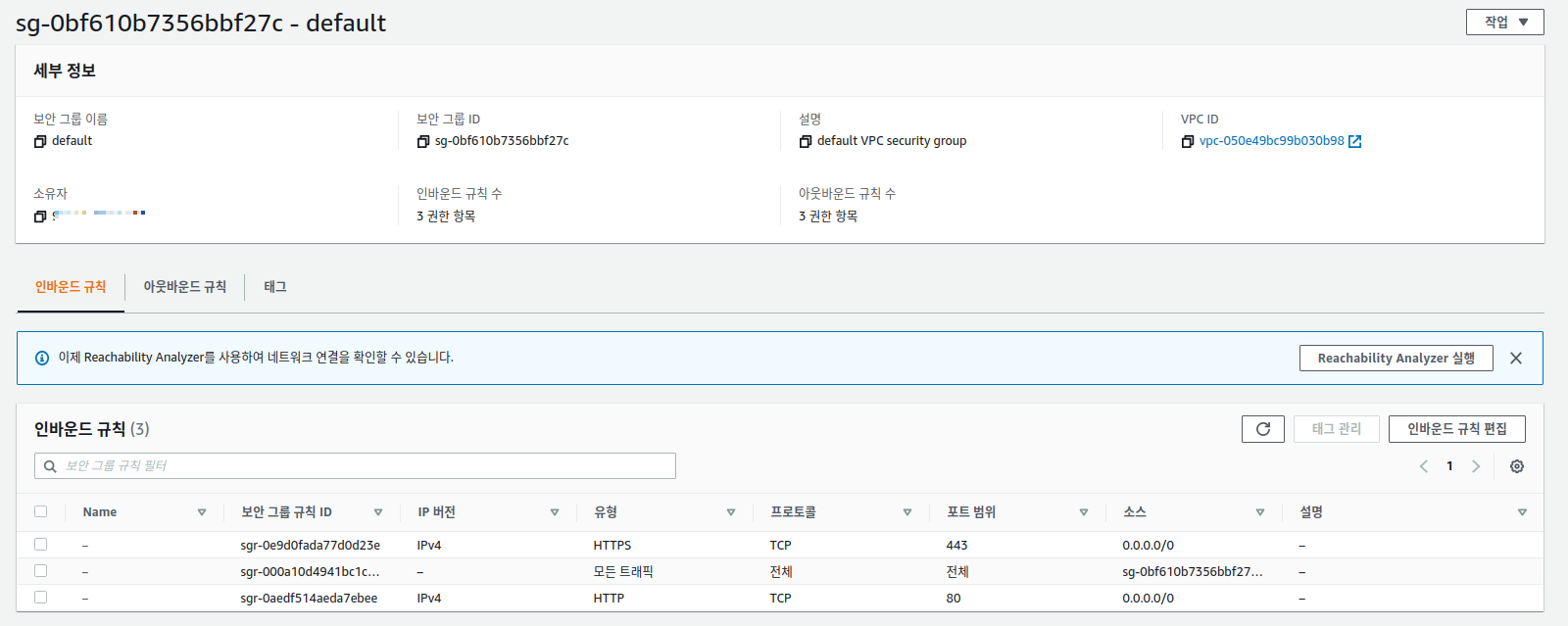
이제 target group에 속한 ec2 인스턴스는 로드 밸런서에서 오는 요청 만 받으면 되니 ec2 인스턴스의 보안 그룹 규칙도 변경해야 한다. application load balancer 가 SSL 종단점 역할을 해서 요청을 해독하고 ec2 인스턴스의 80 번 포트로 forwarding 해주므로 ec2 인스턴스의 보안그룹은 load balancer 의 보안 그룹에서 80 번 포트로 들어오는 요청만 받게 하면 된다. 아래 Fig 13 은 내 ec2 인스턴스 보안 그룹의 인바운드 규칙이다.
80번 포트의 소스가 위 Fig 12 에 나온 로드 밸런서 보안 규칙의 식별자임에 주의를 기울이자. 이렇게 설정하면 이 ec2 인스턴스는 로드밸런서를 통해서 80번 포트로 들어오는 요청만 받아서 처리하게된다. 아래 Fig 13에는 80 번 포트 외에 SSH접속을 위해 22 번 포트를 열어 놨는데 이건 어디서든 접근 할 수 있게 0.0.0.0/0 으로 소스를 설정했다.Fig 13. target group 에 속한 ec2 인스턴스의 보안 규칙
이 단계 까지 끝났으면 application load balancer 가 정상 동작하는지 확인을 해보는게 좋다.
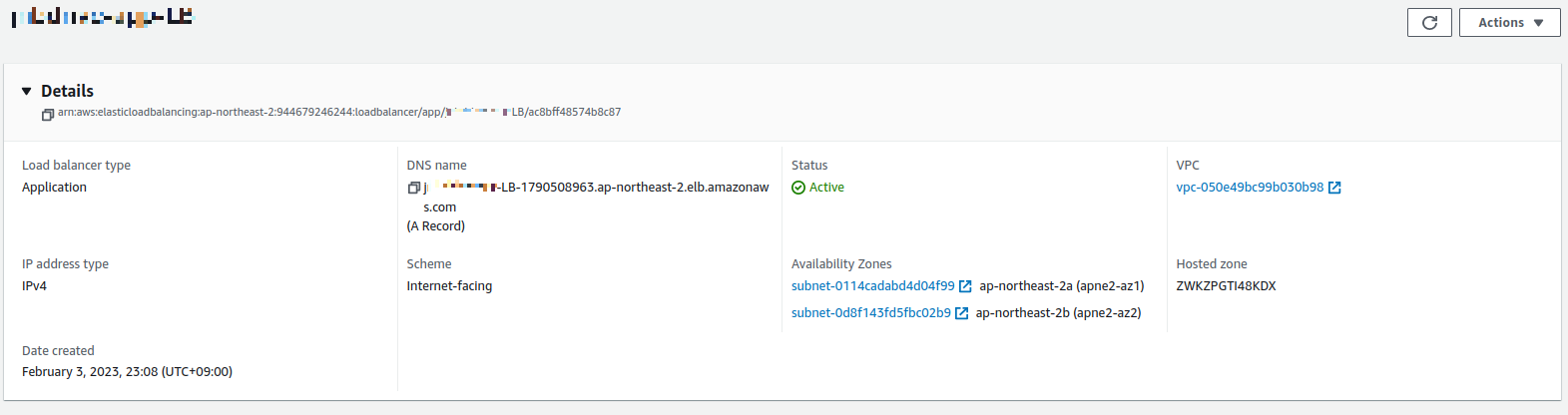
생성한 로드 밸런서의 상세 정보를 보면 ("ec2 콘솔 -> 로드 밸런서") DNS name 이라는 정보가있다. 이걸 카피 해서 웹 브라우저에 복사하자. Fig 13의 붉은 박스 부분이다.
Fig 14. 로드 밸런서 상세 정보
target group에 속한 ec2 인스턴스에서 nginx 가 80번 포트로 요청을 리슨 하도록 설정되어있다면 로드 밸런서 주소로 접근 하면 nginx 의 "Welcome to nginx!" 페이지를 볼 수 있다. DNS name 통해 접속했는데 이 페이지를 볼수 없다면 무언가 잘못 설정했을 확률이 높으니 확인해 보자.
route53의 domain A 레코드 변경
이제 마지막 스탭이나 이 부분은 아주 쉽다. route53 서비스에서 호스팅 영역에 레코드 A의 값을 바꿔 주기만 하면된다.
기존 레코드 A는 도메인 이름에 해당하는 ec2 인스턴스, 즉 서버의 IP를 가지고 있다. 서버가 실행 중인 ec2 앞에 로드 밸런서가 있고 모든 요청은 이 로드 밸런서를 통해서 서버로 포워딩 되도록 할것 이므로 도메인 이름 으로 접속을 하면 ec2 인스턴스가 아닌 로드 밸런서로 요청이 가도록 레코드 A를 변경하는 것이다.
"route53 콘솔 -> 호스팅 영역 선택 -> 유형이 A인 레코드 선택 -> 레코드 편집 클릭"
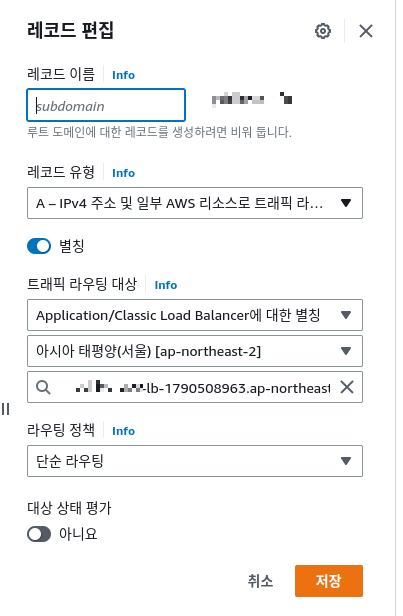
아래 Fig 15 처럼 "별칭"을 enable 하면 기존 값을 입력 하던 입력 폼이 "트래픽 라우팅 대상"을 선택하는 폼으로 바뀐다.
이 라우팅 대상으로 이전 섹션에서 만들었던 application load balancer를 지정하면 된다.
첫번 째 라우팅 대산의 type을 선택 옵션에서 "application/classic load balancer"를 선택한다. 다음으로 가용역영을 선택하는데 application load balancer를 생성할 때 Fig 7의 mapping 에서 지정한 지역 정보를 선택하면 된다. ec2 인스턴스의 가용영역과 같은 값이기도 하다. 마지막으로 라우팅 대상 application load balancer의 DNS를 선택하면 되는데 여기서 한가지 주의 할 점이 있다. 생성한 로드 밸런서를 선택 하려고 하는데 로드밸런서의 DNS name 앞에 "dualstack" 이라는 첨자가 붙는 경우가 있다. 내 경우가 이랬는데 로드 밸런서의 DNS name 이 "alb-app-lb-1790508963.ap-northeast-2.elb.amazonaws.com." 이라면
"dualstack.alb-app-lb-1790508963.ap-northeast-2.elb.amazonaws.com." 와 같은 이름이 추천으로 뜨는 경우다.
이런 경우 "dualstack" 이라는 첨자를 지우고 반드시 생성한 로드 밸런서의 DNS name 과 같은 값으로 입력해야 한다.